

Filters
Type
Experience
Scope
944 items
")
Robotic Car - How to read Gyro Datasheets (Part 1)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this first part I go through the mechanical characteristics of a MEMS gyro and...
See More
Computer Aids for Chemical Engineering
Beginner
Article / Blog
Theory
A curated list of resources for Chemical Engineering students. The resources include syllabi, schedules, course notes, textbooks, screencasts, software, hardware, and other useful links.
See More
System Identification: DMD Control Example
8 min
Intermediate
Video
Theory
This lecture gives a Matlab example of dynamic mode decomposition with control (DMDc) for full-state system identification.
See More
Introduction to Radar Systems: Target Radar Cross Section
Beginner
Presentation
Theory
This course is presented by Robert M. O'Donnell, a former researcher at MIT Lincoln Laboratory, and is designed to instill a basic working knowledge of radar systems.
The set of 10 lectures...
See More
Control Bootcamp: LQG Example in Matlab
13 min
Beginner
Video
Theory
This video combines the LQR and Kalman filter in Matlab on the example of an inverted pendulum on a cart. We stabilize the full nonlinear system with a measurement of a single variable (the...
See More
Advanced process control (APC): Theory & Applications in SAGD
Intermediate
Video
Theory
This webinar is presented by Thiago Avila and covers what APC is, why we do it, examples of APC in the SAGD industry, what optimization opportunities are available, and where this technology...
See More
Autonomous Navigation, Part 3: Understanding SLAM Using Pose Graph Optimizat...
16 min
Beginner
Video
Theory
This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous localization and mapping (SLAM) problem in autonomous navigation.
We’ll...
See More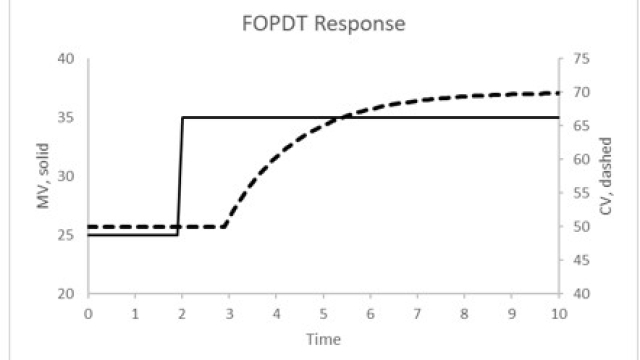
Use First-Principles Modeling to Get FOPDT Coefficient Values
30 min
Intermediate
Article / Blog
Application
Conventionally, we obtain model coefficient values by open-loop step-testing of the process; but this creates undesirable process upsets, and only reveals the local process behavior. This...
See More
How I put the Google Maps Algorithm on my Autonomous Drone
13 min
Intermediate
Video
Application
This fully autonomous drone has an onboard computer ‘brain’, camera ‘eyes’, and an algorithm that generates the fastest path around unknown obstacles as they’re detected mid-flight. Let’s...
See More
Control Systems in Practice, Part 5: A Better Way to Think About a Notch Fil...
13 min
Beginner
Video
Theory
This video describes an intuitive way to approach notch filter design by thinking about the problem as an inverted, lightly damped, second-order low-pass filter. Then, two additional poles...
See More
Feedback in the Squishy Stuff: Introducing Chemical and Biological Process ...
29 min
Beginner
Video
Demonstration
Feedback doesn’t just happen in robots and self-driving cars, but in the regulation of our very bodies and in the ways in which we transform raw ingredients into materials we can use, be...
See More
Control Bootcamp: Limitations on Robustness
9 min
Beginner
Video
Theory
This video describes some of the fundamental limitations of robustness, including time delays and right-half plane zeros.
See More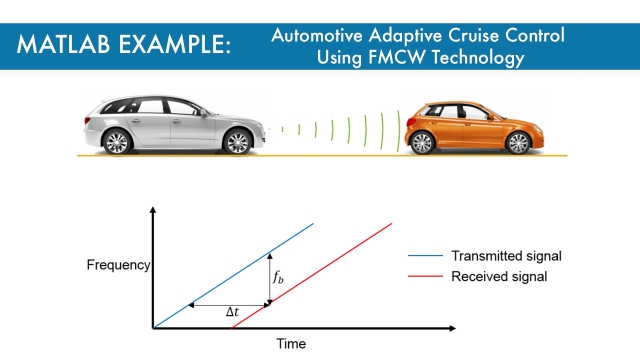
Automotive Adaptive Cruise Control Using FMCW Technology
Intermediate
Example
Application
This MATLAB example shows how to model an automotive adaptive cruise control system using the frequency modulated continuous wave (FMCW) technique. This example performs range and Doppler...
See More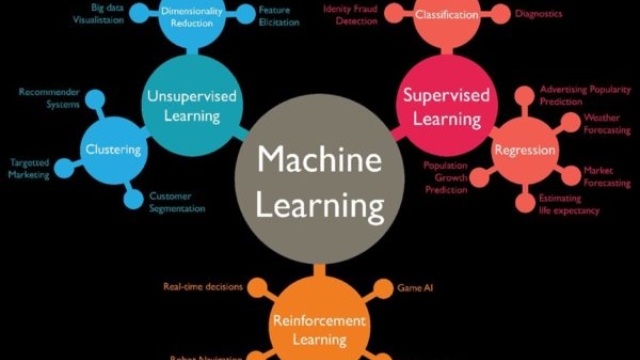
An Artificial Intelligence Primer
15 min
Beginner
Article / Blog
Theory
This blog post is a great primer providing definitions for basic terms used in AI and machine learning (ML) such as supervised learning, unsupervised learning, and transfer learning...
See More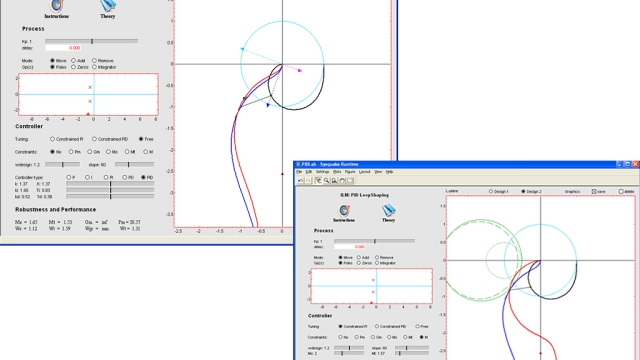
Interactive Tool for Loop Shaping understanding based on PID control
Intermediate
App
Application
Loop shaping is a design method where it is attempted to choose a controller such that the loop transfer function obtains the desired shape. In this module the loop transfer function is...
See More
System Identification: Sparse Nonlinear Models with Control
8 min
Beginner
Video
Theory
This lecture explores an extension of the sparse identification of nonlinear dynamics (SINDy) algorithm to include inputs and control. The resulting SINDY with control (SINDYc) can be used...
See More
Suspending a pendulum in its inverted position using a jig saw (Take 1, norm...
1 min
Beginner
Video
Demonstration
When a pendulum is attached to a jig saw, strange things can happen! :)
See More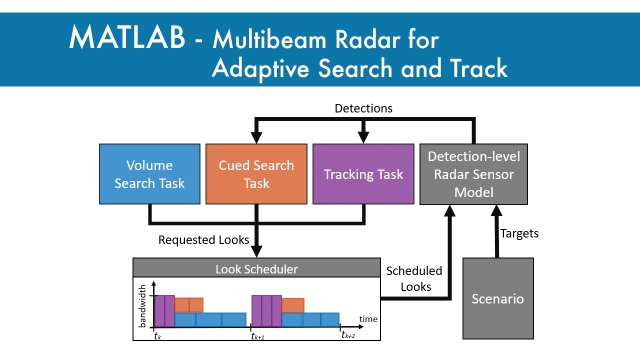
Multibeam Radar for Adaptive Search and Track
Intermediate
Example
Application
This MATLAB example shows how to use radarDataGenerator for a closed-loop simulation of a multifunction phased array radar (MPAR). The example starts by defining MPAR system parameters and...
See More
Systems Engineering, Part 5: Some Benefits of Model-Based Systems Engineerin...
12 min
Beginner
Video
Theory
Learn how model-based systems engineering (MBSE) can help you cut through the chaos of early systems development and get you from definition to execution more seamlessly.
You’ll hear the...
See More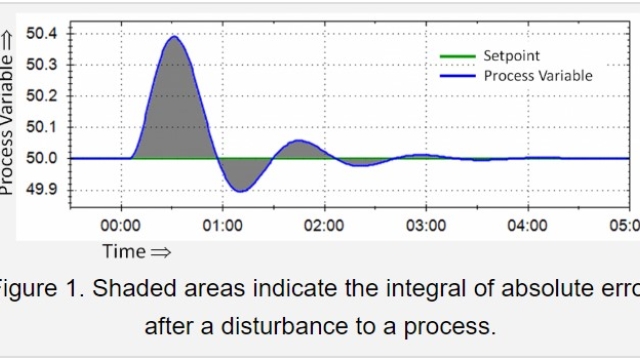
Min IAE Tuning
15 min
Intermediate
Article / Blog
Application
Procedure and Commentary on tuning for minimum Integral of the Absolute Error
See More
Introduction to Linear Quadratic Regulator (LQR) Control
96 min
Beginner
Video
Theory
In this video we introduce the linear quadratic regulator (LQR) controller. We show that an LQR controller is a full state feedback controller where the gain matrix K is computed by solving...
See More
Pulse Waveform Analyzer App
Intermediate
App
Application
The Pulse Waveform Analyzer app lets you explore the properties of signals commonly used in radar. You can display 2-D and 3-D plots that let you visualize waveform time series and spectra.
... See More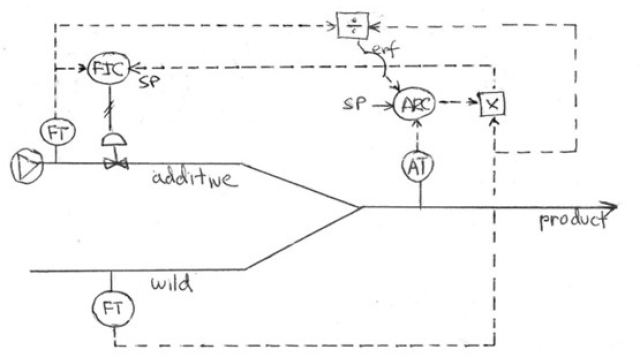
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use Ratio Control and use Scaled Signals
See More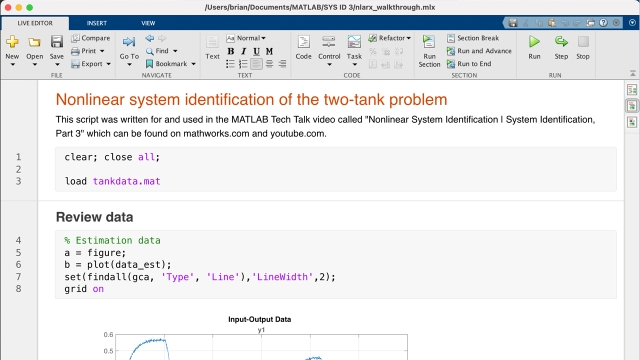
MATLAB scripts for "Nonlinear System Identification | System Identification,...
Intermediate
Software
Demonstration
This Github repo contains the data files and MATLAB scripts that were used in "Nonlinear System Identification | System Identification, Part 3".
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
48 min
Intermediate
Video
Theory
This is the recorded talk of the paper by the same title.
See More