

Filters
Type
Experience
Scope
944 items

Understanding Model Predictive Control, Part 4: Adaptive, Gain-Scheduled and...
6 min
Beginner
Video
Theory
This video explains the type of MPC controller you can use based on your plant model, constraints, and cost function. An optimization problem with these properties is a convex one, and you...
See More
Frequency domain – tutorial 9: frequency response
23 min
Beginner
Video
Theory
In this video, the learning objectives are to:1- fully understand the frequency response which forms the foundation of filtering 2- quickly review the common...
See More![Motivation for Full-State Estimation [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_378.jpg?itok=AFDlS2AH "Motivation for Full-State Estimation [Control Bootcamp]")
Motivation for Full-State Estimation [Control Bootcamp]
11 min
Beginner
Video
Theory
This video discusses the need for full-state estimation. In particular, if we want to use full-state feedback (e.g., LQR), but only have limited measurements of the system, it is necessary...
See More
Dynamic Behavior and Input Types in Process Control
13 min
Beginner
Video
Theory
An introduction to the four types of dynamic behavior and five types of inputs (step, ramp, pulse, impulse, and sinusoidal), and why transfer functions are u...
See More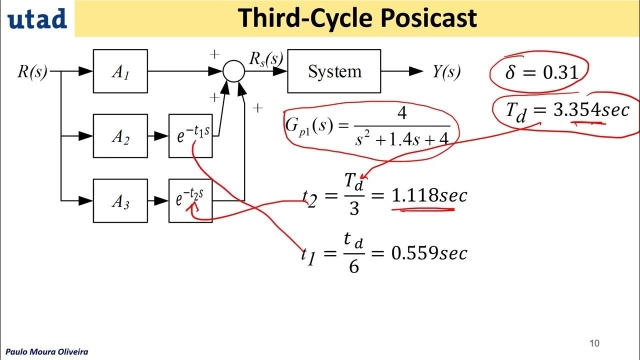
Posicast Control 6 - ( In English)
12 min
Beginner
Video
Theory
This video presents the transition from half-cycle to other cycles ( third-cycle, fourth-cycle,..)
See More
Peter Ponders PID - Simulation Methods, Which is Best?
22 min
Beginner
Video
Theory

Lecture 2: LTI Systems, Laplace Transform Review and Transfer Function
38 min
Beginner
Video
Theory

Intro to Process Control
6 min
Beginner
Video
Theory
I discuss the motivation and introduce the logic behind controllers that engineers design to respond to errors in outputs (deviations from set points). P and...
See More")
Principal Component Analysis (PCA)
13 min
Beginner
Video
Theory
Principal component analysis (PCA) is a workhorse algorithm in statistics, where dominant correlation patterns are extracted from high-dimensional data.
See More
Peter Ponders PID - System Identification Basics
11 min
Beginner
Video
Theory

Lecture 17: Introduction to Compensators/Controllers
35 min
Beginner
Video
Theory

Lecture 23: Bode plots
48 min
Beginner
Video
Theory
Working with Synthetic Data | Deep Learning for Engineers, Part 2
18 min
Beginner
Video
Theory
This video covers the first step in deep learning: having access to data. Part of making the decision of whether deep learning is right for your project comes down to the type and amount of...
See More
Bode Plots by Hand: Real Poles or Zeros
13 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
Sketching Root Locus Part 2
16 min
Beginner
Video
Theory
This is the second part of how to sketch a root locus by hand. However instead of following the normal rules for sketching a locus that you'd see in a book, I decided to explain the rules...
See More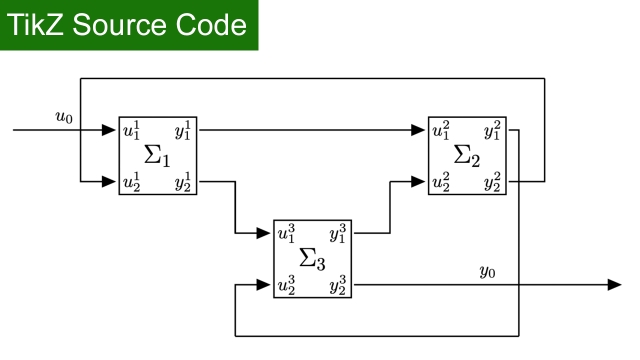
TikZ source Code: An interconnection of MIMO subsystems
Beginner
Source Code
Application
TikZ source Code: An interconnection of MIMO subsystems
See More
Designing a Lead Compensator with Bode Plot
14 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Bode Plot method.
See More
Vector Derivatives (the Equation of Coriolis) and the Angular Velocity Vecto...
72 min
Intermediate
Video
Theory
In this video we develop the Equation of Coriolis which describes how a vector in a rotating reference frame changes from the perspective of an observer in a non-rotating reference frame. We...
See More
Numerically Calculating Partial Derivatives
59 min
Beginner
Video
Theory
In this video we discuss how to calculate partial derivatives of a function using numerical techniques. In other words, these partials are calculated withou...
See More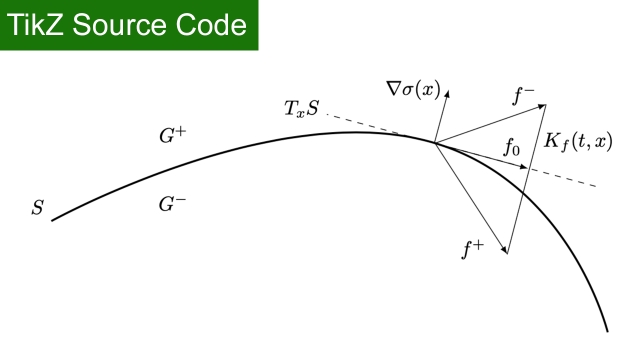
TikZ source Code: Switching Smooth Filippov
Beginner
Source Code
Application
TikZ source Code: Switching Smooth Filippov
See More
The Inverse Laplace Transform
48 min
Beginner
Video
Theory
In this video we show how to perform the inverse Laplace transform on a signal in the Laplace domain to obtain its equivalent representation in the time doma...
See More
Data-Driven Control: ERA/OKID Example in Matlab
8 min
Intermediate
Video
Application
In this lecture, we explore the observer Kalman filter identification (OKID) and eigensystem realization algorithm (ERA) in Matlab on an example.
See More
Laplace domain – tutorial 6: Transfer function & system properties
24 min
Beginner
Video
Theory
In this video, we learn about transfer function and system properties. The following materials are covered:1) what is a transfer function?2) relation between...
See More
Control Systems Lectures - Transfer Functions
11 min
Beginner
Video
Theory
This lecture describes transfer functions and how they are used to simplify modeling of dynamic systems.
See More![SVD: Optimal Truncation [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_423.jpg?itok=Op0DbiId)
SVD: Optimal Truncation [Matlab]
12 min
Intermediate
Video
Application
This video describes how to optimally truncate the singular value decomposition (SVD) for noisy data (Matlab code).
See More