

Filters
Type
Experience
Scope
944 items
Systems modeling and representations (French)
Beginner
Course
Theory
Complete course on systems modeling. Includes examples, MATLAB code, and quizzes.
See More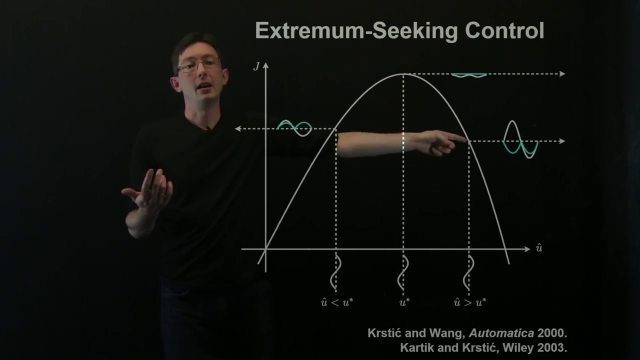
Extremum Seeking Control in Matlab
17 min
Beginner
Video
Application
This lecture explores extremum-seeking control (ESC) on a simple example in Matlab. In particular, a discrete-time (digital) version of ESC is coded in a Matlab script.
See More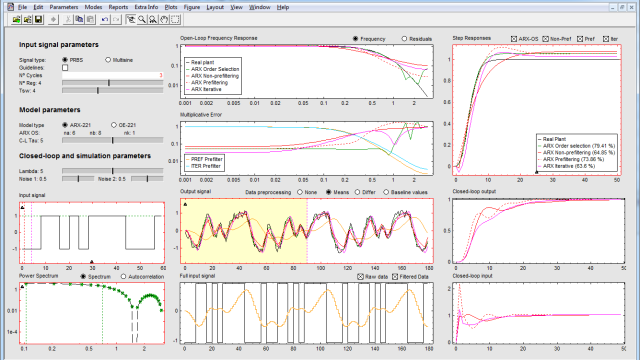
ITCRI: An Interactive Software Tool for Control-Relevant Identification
Intermediate
App
Application
The Interactive Tool for Control Relevant Identification (ITCRI) comprehensively captures the control-relevant identification process, from input design to closed-loop control, depicting...
See More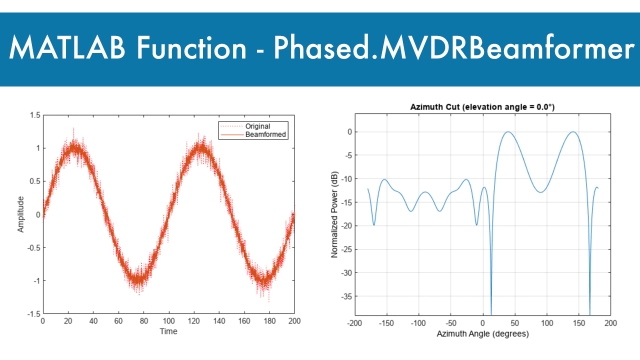
MATLAB Function: phased.MVDRBeamformer
Intermediate
Article / Blog
Application
The phased.MVDRBeamformer System object™ implements a narrowband minimum-variance distortionless-response (MVDR) beamformer. The MVDR beamformer is also called the Capon beamformer. An MVDR...
See More
Model predictive control python toolbox
Intermediate
Software
Application
do-mpc is a comprehensive open-source toolbox for robust model predictive control (MPC) and moving horizon estimation (MHE). do-mpc enables the efficient formulation and solution of control...
See More
Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More
Discrete control #4: Discretize with the matched method
14 min
Beginner
Video
Theory
This is the fourth video on discrete control and in this video we are going to continue exploring the different techniques we can use to discretize a continuous system and talk about the...
See More
Why Choose Model-Based Reinforcement Learning?
15 min
Intermediate
Video
Theory
What is the difference between model-free and model-based reinforcement learning? Explore the differences and results as the learning models are applied to balancing a cart/pole system as an...
See More
MIMO Radar: TI Application Report
Intermediate
Article / Blog
Theory
MIMO radar is a key technology in improving the angle resolution (spatial resolution) of mmwave-radars. This article introduces the basic principles of the MIMO-radar and the different...
See More
MATLAB Function: ztrans
Intermediate
Software
Application
ztrans(f) finds the Z-Transform of f. By default, the independent variable is n and the transformation variable is z. If f does not contain n, ztrans uses symvar.
See More
Modelling, dynamics and control
Beginner
Course
Theory
How do we model the world around us and use this to understand its behaviour? How does behaviour depend upon the engineering choices we make and therefore how do we undertake design to...
See More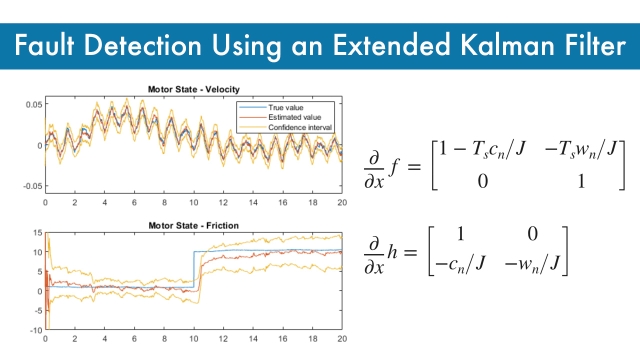
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More
Machine Learning & Text Processing Lectures
Beginner
Video
Theory
This is the video lecture collection by Victor Lavrenko.
See More
Full Stack Deep Learning
Intermediate
Course
Theory
There are many great courses to learn how to train deep neural networks. However, training the model is just one part of shipping a deep learning project. This course teaches full-stack...
See More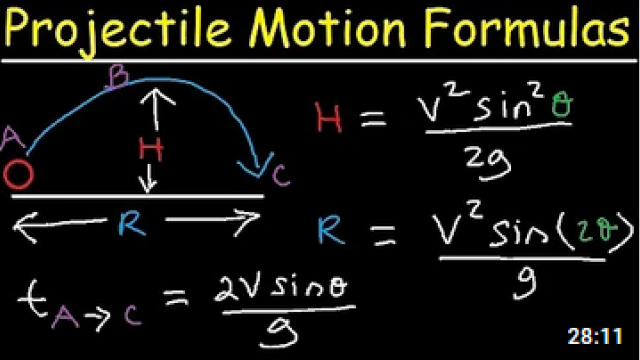
Projectile Motion Equations and Theory
28 min
Beginner
Video
Application
In this video, an important topic under 2D Kinematics i.e. Projectile Motion, is covered. Its theory, equations, and examples are thoroughly discussed.
See More
Model Reference Adaptive Control Part-1
60 min
Beginner
Video
Theory
Video course on nonlinear and adaptive control by Dr. Shubhendu Bhasin, Department of Electrical Engineering, IIT Delhi.
See More
A simple MEMS gyro model using MATLAB / Simulink
16 min
Beginner
Video
Theory
This video walks through how to model a simple MEMS gyroscope using MATLAB/Simulink. At the end I show you how to linearize this model to use in your linear control loop design and analysis.
See More
Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More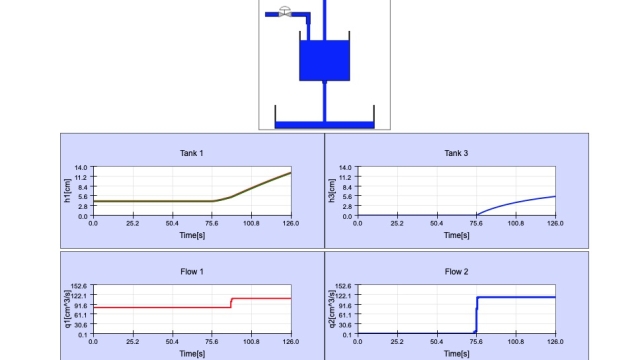
Virtual Lab for a Two-tanks system
Beginner
Virtual Lab
Application
This is a virtual lab for a two-tank system that can be used for modelling and control learing/teaching purposes. Open-loop tests and closed-loop simulatons based on PI control or PI plus...
See More
A* Pathfinding (E01: algorithm explanation)
12 min
Beginner
Video
Theory
Welcome to the first part in a series teaching pathfinding for video games. In this episode we take a look at the A* algorithm and how it works.
See More
Averaging Methods in Nonlinear Dynamical Systems
Intermediate
Book
Theory
Perturbation theory and in particular normal form theory has shown strong growth during the last decades. So it is not surprising that the authors have presented an extensive revision of the...
See More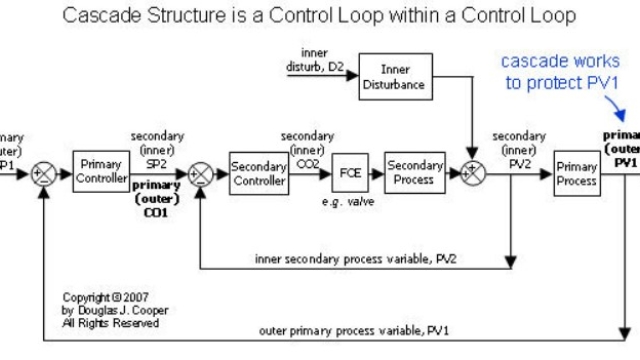
Cascade Control 2
Intermediate
Article / Blog
Application
An Implementation Recipe for Cascade Control
See More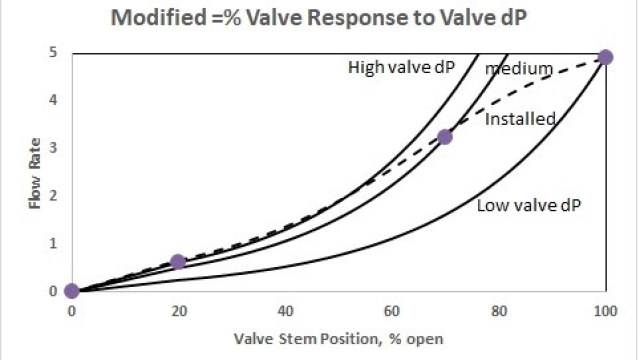
Understanding Valve Flow Characteristics
20 min
Intermediate
Article / Blog
Application
The response of flow rate through a control valve depends on the friction losses in the piping in which it is installed as well as the controller signal. The installed characteristic (a...
See More
Override and Reset Feedback
15 min
Intermediate
Article / Blog
Application
Override controllers are for safety or switching to auxiliary variables. The non-selected controller needs to prevent becoming wound up.
See More
Control Loop Foundation Batch and Continuous Processes - Interactive Source ...
Intermediate
Virtual Lab
Application
Control Loop Foundation contains workshops that allow the reader to get hands on experience through this web interface. Once a lab is selected, then you may access workshop directions and...
See More