

Filters
Type
Experience
Scope
944 items

Discrete control #2: Discretize! Going from continuous to discrete domain
24 min
Beginner
Video
Theory
This is the second video in the discrete control series. It focuses on discretizing a continuous system - getting to the z-domain from the s-domain.
See More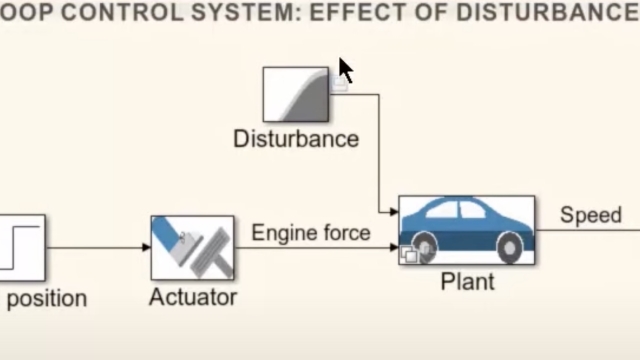
Understanding Control Systems: The Disturbance Rejection Problem
6 min
Beginner
Video
Demonstration
This video provides a demonstration using a car to show how you can simulate open- and closed-loop systems in Simulink®.
First, you will learn how to model and tune open-loop systems. The...
See More
RADAR Engineering
200 min
Intermediate
Course
Theory
Radar technology is used widely today. The principles involved are very fundamental and every engineering student studies them at least once. This playlist covers Radar Engineering for an EE...
See More
Advances in Feedforward Control for Measurable Disturbances (slides)
Intermediate
Presentation
Theory
These slides present several contributions to improve the feedforward control approaches when inversion problem arise: the ideal compensator may not be realizable due to negative delay...
See More
Vibrational Control in Insect Flight
7 min
Intermediate
Video
Application
Abstract: It is generally accepted among biology and engineering communities that insects are unstable at hover. However, existing approaches that rely on direct averaging do not fully...
See More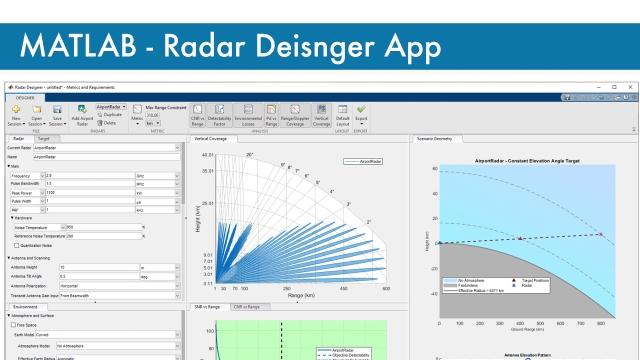
Matlab Radar Designer App
Intermediate
App
Application
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development. Using...
See More
Control Bootcamp: Kalman Filter Example in Matlab
22 min
Beginner
Video
Application
This lecture explores the Kalman Filter in Matlab on an inverted pendulum on a cart.
See More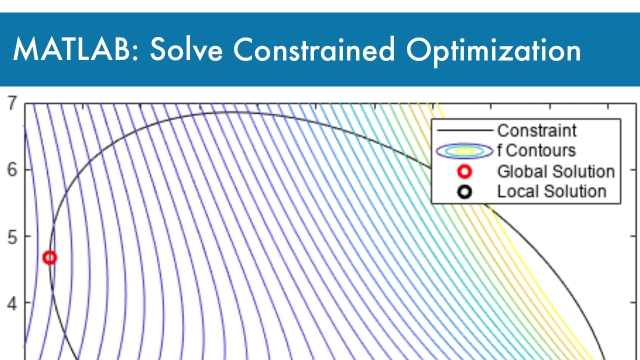
MATLAB Example: Solve Constrained Nonlinear Optimization, Problem-Based
Intermediate
Example
Theory
This example shows how to find the minimum of a nonlinear objective function with a nonlinear constraint by using the problem-based approach.
See More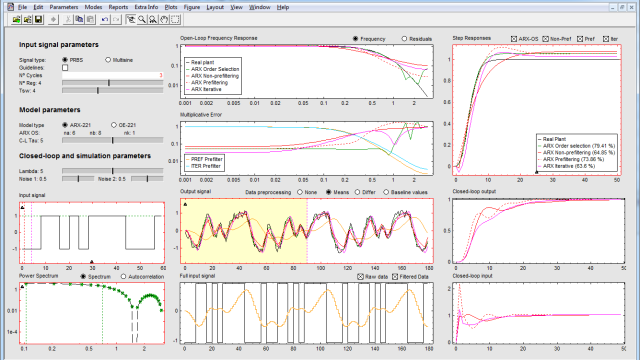
ITCRI: An Interactive Software Tool for Control-Relevant Identification
Intermediate
App
Application
The Interactive Tool for Control Relevant Identification (ITCRI) comprehensively captures the control-relevant identification process, from input design to closed-loop control, depicting...
See More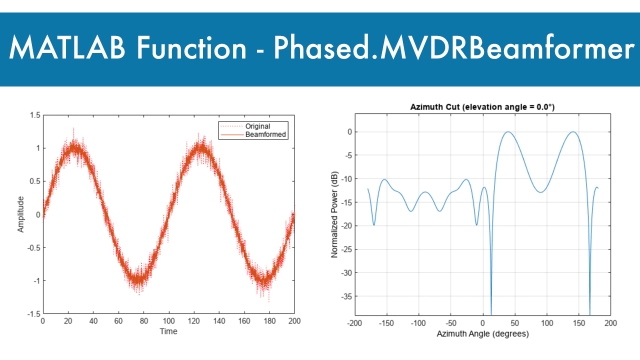
MATLAB Function: phased.MVDRBeamformer
Intermediate
Article / Blog
Application
The phased.MVDRBeamformer System object™ implements a narrowband minimum-variance distortionless-response (MVDR) beamformer. The MVDR beamformer is also called the Capon beamformer. An MVDR...
See More
Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More
Improving the Beginner's PID - Introduction
30 min
Beginner
Article / Blog
Application
In conjunction with the release of the new Arduino PID Library Brett has released this series of posts that explain his PID code. He start's with what he call's “The Beginner’s PID.” He...
See More
Systems modeling and representations (French)
Beginner
Course
Theory
Complete course on systems modeling. Includes examples, MATLAB code, and quizzes.
See More
Why Choose Model-Based Reinforcement Learning?
15 min
Intermediate
Video
Theory
What is the difference between model-free and model-based reinforcement learning? Explore the differences and results as the learning models are applied to balancing a cart/pole system as an...
See More
MIMO Radar: TI Application Report
Intermediate
Article / Blog
Theory
MIMO radar is a key technology in improving the angle resolution (spatial resolution) of mmwave-radars. This article introduces the basic principles of the MIMO-radar and the different...
See More
Modelling, dynamics and control
Beginner
Course
Theory
How do we model the world around us and use this to understand its behaviour? How does behaviour depend upon the engineering choices we make and therefore how do we undertake design to...
See More
Machine Learning & Text Processing Lectures
Beginner
Video
Theory
This is the video lecture collection by Victor Lavrenko.
See More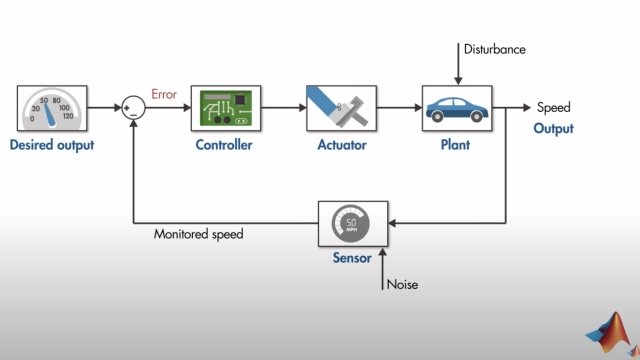
Understanding Control Systems: Components of a Feedback Control System
5 min
Beginner
Video
Demonstration
This video introduces the components of a feedback control system and how they interact with each other.
Learn basic terminology by walking through examples that include driving a car...
See More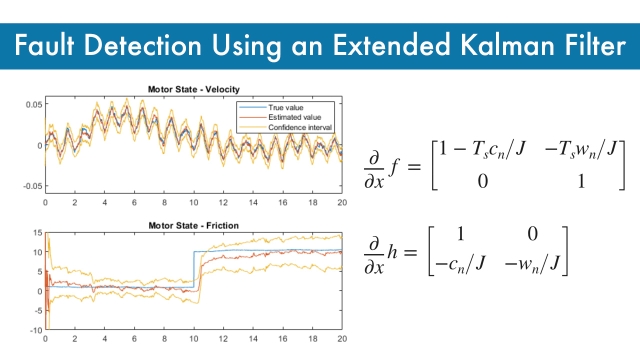
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More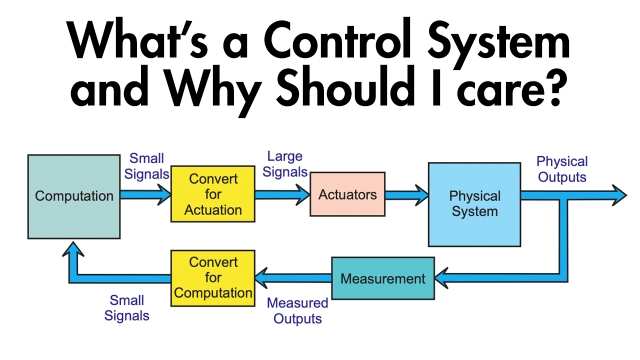
What's a Control System and Why Should I Care?
Beginner
Article / Blog
Theory
This paper is designed as a primer for college level STEM students about to take their first formal class in feedback control systems. This means that the explanations assume the reader has...
See More
TCLab PID Control
60 min
Intermediate
Article / Blog
Application
Implement a PID controller on the Temperature Control Lab hardware to drive the temperature from room temperature to 60 degrees C. This resource lets you attempt the design yourself first...
See More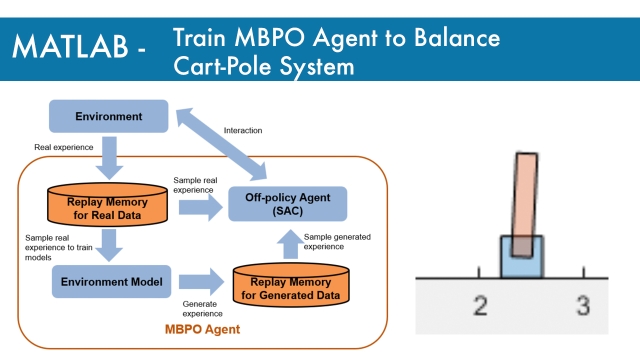
MATLAB Example: Train MBPO Agent to Balance Cart-Pole System
Intermediate
Example
Demonstration
This example shows how to train a model-based policy optimization (MBPO) agent to balance a cart-pole system modeled in MATLAB. For more information on MBPO agents, see Model-Based Policy...
See More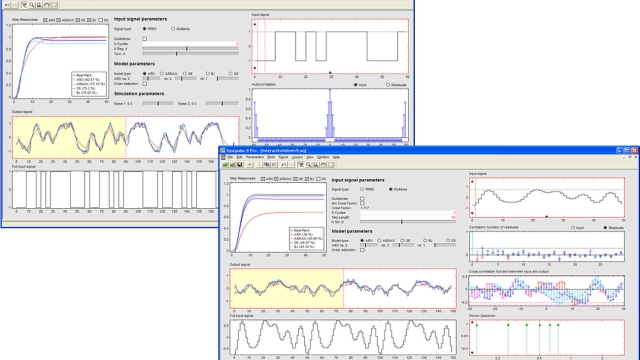
ITSIE: An Interactive Software Tool for System Identification Education
Beginner
App
Application
ITSIE is an Interactive Tool for System Identification Education. The tool is developed using Sysquake, a Matlab-like language with fast execution and excellent facilities for interactive...
See More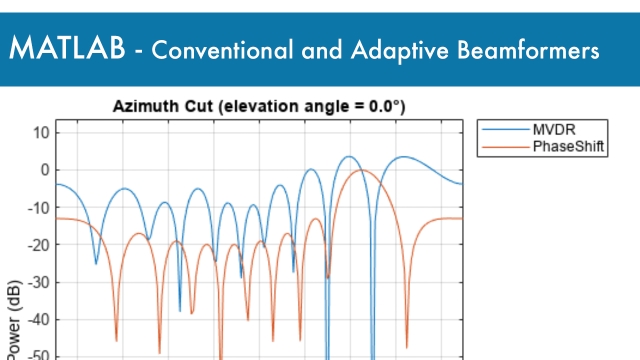
Conventional and Adaptive Beamformers
Intermediate
Example
Application
This example illustrates how to apply digital beamforming to a narrowband signal received by an antenna array. Three beamforming algorithms are illustrated: the phase shift beamformer...
See More
System Identification: Koopman with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of the use of modern Koopman spectral theory for nonlinear control. In particular, we develop control in a coordinate system defined by eigenfunctions of...
See More