

Filters
Type
Experience
Scope
944 items

MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More
Control Systems in Practice, Part 8: The Gang of Six in Control Theory
18 min
Beginner
Video
Theory
When analyzing feedback systems, we can get caught up thinking solely about the relationship between the reference signal and the output. However, to fully understand how a feedback system...
See More
Understanding Kalman Filters, Part 5: Nonlinear State Estimators
8 min
Beginner
Video
Theory
This video explains the basic concepts behind nonlinear state estimators, including extended Kalman filters, unscented Kalman filters, and particle filters.
A Kalman filter is only defined...
See More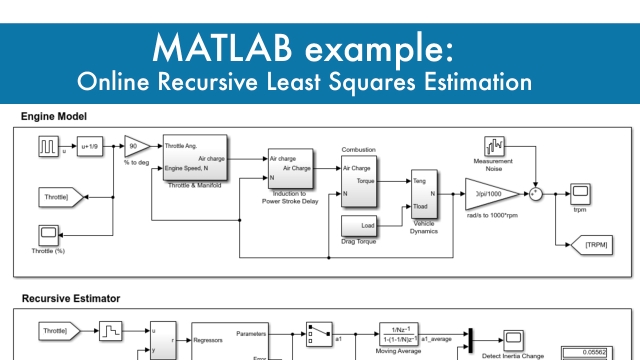
MATLAB Example: Online Recursive Least Squares Estimation
Intermediate
Project
Demonstration
This example shows how to implement an online recursive least squares estimator. You estimate a nonlinear model of an internal combustion engine and use recursive least squares to detect...
See More
Resonance in Nature and Bioinspired Squid Robots
18 min
Beginner
Video
Demonstration
Bioinspired robots combine the best of both biology and engineering. Using tools learned from nature, we can build squid-like and other squishy robots to improve current capabilities in...
See More
What Is Extremum Seeking Control? | Learning-Based Control
16 min
Beginner
Video
Theory
Get an introduction to extremum seeking control—an adaptive control method for finding an optimal control input or set of system parameters without needing a model of your system, static...
See More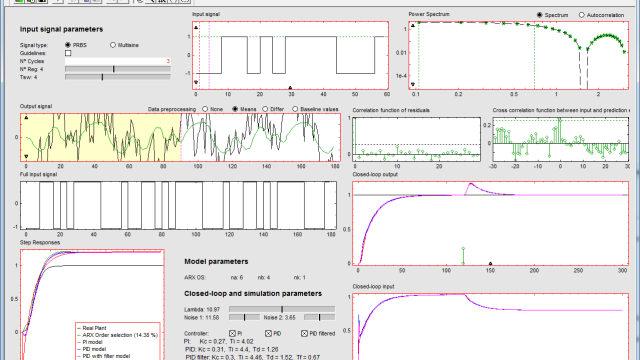
i-pIDtune: An interactive tool for integrated system identification and PID ...
Intermediate
App
Application
i-pIDtune is an interactive software tool that integrates system identification and PID controller design. The tool supports experimental design and execution under plant-friendly conditions...
See More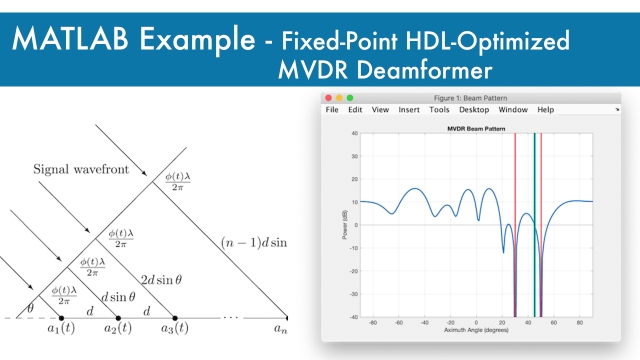
Fixed-Point HDL-Optimized Minimum-Variance Distortionless-Response (MVDR) Be...
Intermediate
Example
Application
This example shows how to implement a fixed-point HDL-optimized minimum-variance distortionless-response (MVDR) beamformer in MATLAB.
See More
Perspectives on Control-Relevant Identification Through the Use of Interacti...
Intermediate
Peer Reviewed Paper
Theory
This paper presents a control-relevant identification methodology through an intuitive interactive tool called "Interactive Tool for Control Relevant Identification (ITCRI)". ITCRI...
See More
Drone Simulation and Control, Part 1: Setting Up the Control Problem
14 min
Beginner
Video
Theory
Quadcopters and other styles of drones are extremely popular, partly because they have sophisticated programmed control systems that allow them to be stable and fly autonomously with very...
See More
Algorithms for Automated Driving
Intermediate
Project
Application
Each chapter of this (mini-)book guides you in programming one important software component for automated driving. Currently, this book contains two chapters: Lane Detection, and Control...
See More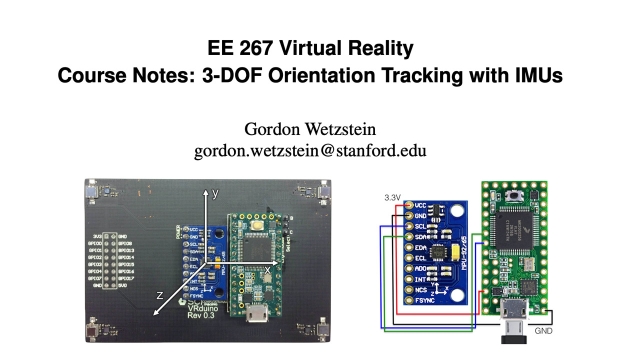
3-DOF Orientation Tracking with IMUs
30 min
Beginner
Article / Blog
Theory
This document is not meant to be a comprehensive review of orientation tracking for virtual reality applications but rather an intuitive introduction to inertial measurement units (IMUs) and...
See More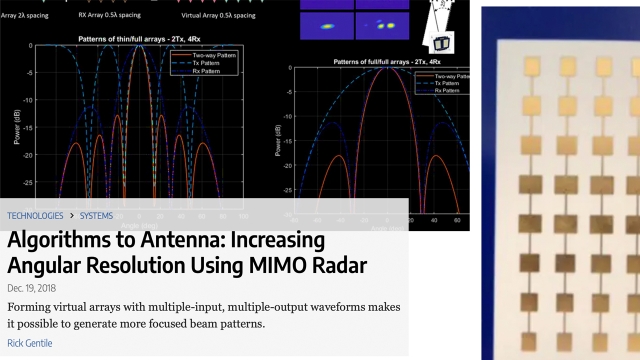
Algorithms to Antenna: Increasing Angular Resolution Using MIMO Radar
Intermediate
Article / Blog
Theory
Articles in Microwaves & RF that talks about how forming virtual arrays with multiple-input, multiple-output waveforms makes it possible to generate more focused beam patterns.
See More
Nyquist Stability Criterion, Part 2
18 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion part 2. This video steps through the how to sketch a Nyquist plot by hand, what to do if there are open loop pools on the imaginary axis...
See More
Creating Discrete-Time Models
Intermediate
Example
Theory
This MATLAB example shows how to create discrete-time linear models using the tf, zpk, ss, and frd commands.
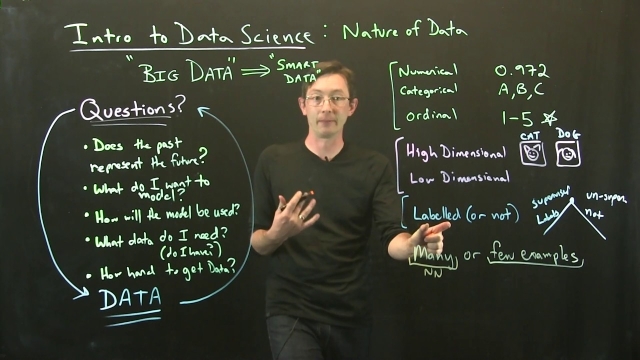
Intro to Data Science: The Nature of Data
12 min
Beginner
Video
Theory
This lecture discusses the types of data you might encounter, and how it determines which techniques to use.
See More
Trimming and Linearization, Part 2: The Practical Side of Linearization
11 min
Beginner
Video
Theory
With a general understanding of linearization, you might run into a few snags when trying to linearize realistic nonlinear models. These snags can be avoided if you have a more practical...
See More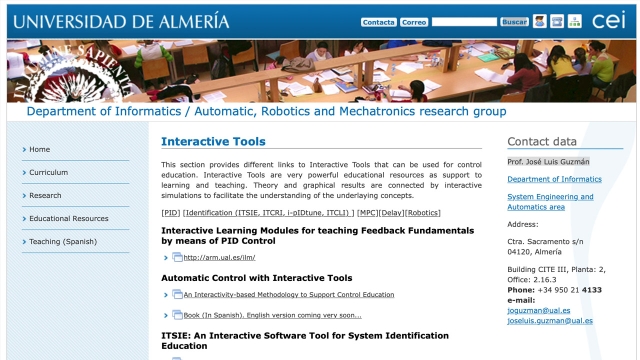
Interactive Tools for Control Purposes
Intermediate
App
Theory
This resource provides different links to Interactive Tools that can be used for control education. Interactive Tools are very powerful educational resources as support to learning and...
See More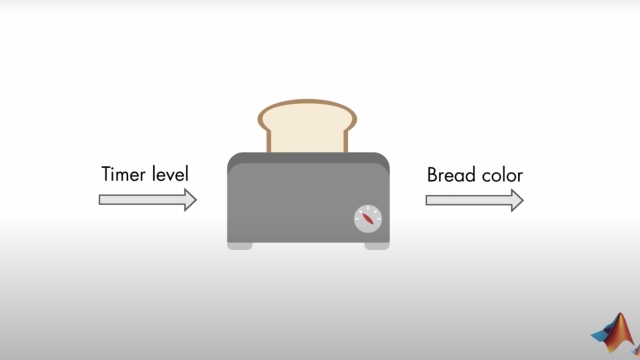
Understanding Control Systems: Open-Loop Control Systems
6 min
Beginner
Video
Theory
This video explores open-loop control systems by walking through some introductory examples.
Learn how open-loop systems are found in everyday appliances like toasters or showers, and...
See More
RADAR Engineering
200 min
Intermediate
Course
Theory
Radar technology is used widely today. The principles involved are very fundamental and every engineering student studies them at least once. This playlist covers Radar Engineering for an EE...
See More
Advances in Feedforward Control for Measurable Disturbances (slides)
Intermediate
Presentation
Theory
These slides present several contributions to improve the feedforward control approaches when inversion problem arise: the ideal compensator may not be realizable due to negative delay...
See More
Vibrational Control in Insect Flight
7 min
Intermediate
Video
Application
Abstract: It is generally accepted among biology and engineering communities that insects are unstable at hover. However, existing approaches that rely on direct averaging do not fully...
See More
Matlab Radar Designer App
Intermediate
App
Application
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development. Using...
See More
Data-Driven Dynamical Systems Overview
21 min
Intermediate
Video
Theory
This video provides a high-level overview of this new series on data-driven dynamical systems. In particular, we explore the various challenges in modern dynamical systems, along with...
See More
Discrete control #4: Discretize with the matched method
14 min
Beginner
Video
Theory
This is the fourth video on discrete control and in this video we are going to continue exploring the different techniques we can use to discretize a continuous system and talk about the...
See More