

Filters
Type
Experience
Scope
944 items

Control Bootcamp: LQG Example in Matlab
13 min
Beginner
Video
Theory
This video combines the LQR and Kalman filter in Matlab on the example of an inverted pendulum on a cart. We stabilize the full nonlinear system with a measurement of a single variable (the...
See More
Feedforward tuning rules for measurable disturbances with PID control: a tut...
Intermediate
Peer Reviewed Paper
Theory
Feedforward control can be considered as the most well-known control approach to deal with measurable disturbances. It started to be used almost 100 years ago, and since then it is being...
See More
FOPDT Models from Skyline Inputs
20 min
Intermediate
Article / Blog
Application
The classic textbook method to generate FOPDT models is the reaction curve technique, a pre-computer era technique: Start from a steady state, make a step and hold in the controller output...
See More
Python Control Systems Library
Intermediate
Software
Application
The python-control package is a set of python classes and functions that implement common operations for the analysis and design of feedback control systems. The initial goal is to implement...
See More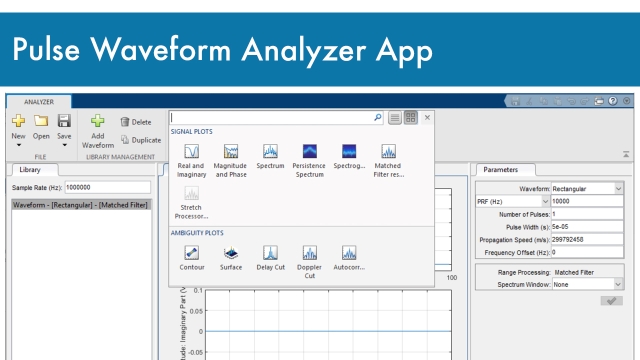
Pulse Waveform Analyzer App
Intermediate
App
Application
The Pulse Waveform Analyzer app lets you explore the properties of signals commonly used in radar. You can display 2-D and 3-D plots that let you visualize waveform time series and spectra.
... See More
Real-Time Software Implementation of Analog Filters
14 min
Intermediate
Video
Application
Modelling analog filters, discretisation, and implementation of the digitally-equivalent filters on a real-time, embedded system (STM32). Includes theory, DSP, firmware, and results.
See More
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use Ratio Control and use Scaled Signals
See More
Passivity-Based Control to Guarantee Stability | Control Systems in Practice...
15 min
Beginner
Video
Theory
Learn about passivity-based control to guarantee closed-loop stability of feedback systems. Consider different ways to assess the stability of systems other than looking at gain and phase...
See More
Using ‘fminsearch’ to Minimize a Function Specified by a File with Extra Par...
25 min
Beginner
Video
Application
In this video we show 4 different ways to use/call Matlab’s ‘fminsearch’ function to perform unconstrained optimization.Topics and timestamps:0:00 – Introduc...
See More
Why Padé Approximations Are Great! | Control Systems in Practice
Beginner
Video
Theory
Watch an introduction to Padé approximations. Learn what Padé approximations are and how to calculate them, why they are important, and when to use them—specifically in the context of time...
See More
Toys for Control Education
Intermediate
App
Theory
Teaching materials for control engineering education that run in web browsers. Speed control, position control, step response of 2nd order system, pole and impulse response, and rocket.
See More
Základy automatizácie a teórie systémov – videokurz (Slovak)
Beginner
Article / Blog
Theory
Pozrite si videokurz zo základov teórie systémov a automatizácie. Náš kurz má 7 lekcií.
See More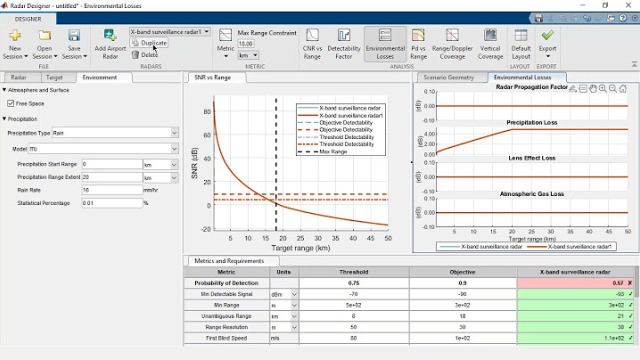
Radar Design with the Radar Designer App
5 min
Beginner
Video
Theory
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development.
See More
Averaging and Vibrational Control of Mechanical Systems
Intermediate
Peer Reviewed Paper
Theory
Abstract. This paper investigates averaging theory and oscillatory control for a large class of mechanical systems. A link between averaging and controllability theory is presented by...
See More
Autonomous Navigation, Part 6: Metrics for System Assessment
15 min
Beginner
Video
Theory
Take a systems engineering approach to verifying the autonomous navigation system end to end and learn how simulations and physical tests can complement each other. The video also covers a...
See More
MATLAB function: phased.LCMVBeamformer
Intermediate
Article / Blog
Application
The phased.LCMVBeamformer object implements a narrowband linear-constraint minimum-variance (LCMV) beamformer for a sensor array. The LCMV beamformer belongs to the family of constrained...
See More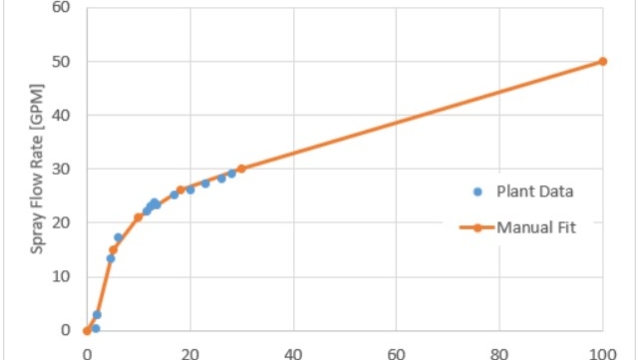
Output Characterization to Linearize a Loop - Control valve application
20 min
Intermediate
Article / Blog
Application
This application paper explains how a control valve created nonlinearity in a loop and how output characterization solved the problem
See More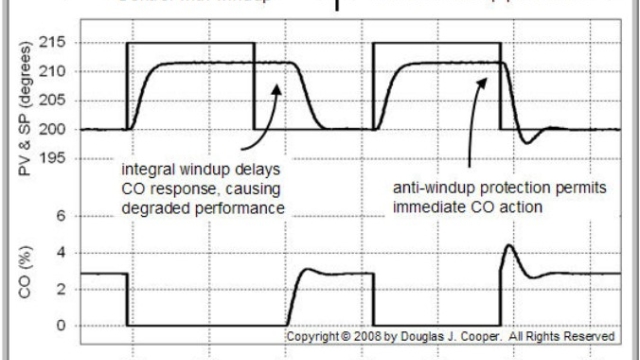
Integral Wind-Up and Solution
Intermediate
Article / Blog
Application
What is integral wind-up and how velocity mode solves it.
See More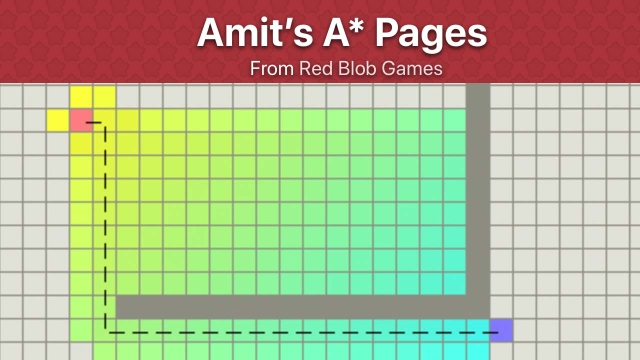
Pathfinding with A*
60 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* pathfinding algorithm. This resource uses motivating examples from computer games.
See More
![Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_490.jpg?itok=qWteM4RS "Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]")
Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]
12 min
Beginner
Video
Theory
Here we use the 'place' command in Matlab to design full-state feedback gains to specify the eigenvalues of the closed-loop system. This is demonstrated on the inverted pendulum on a cart.
See More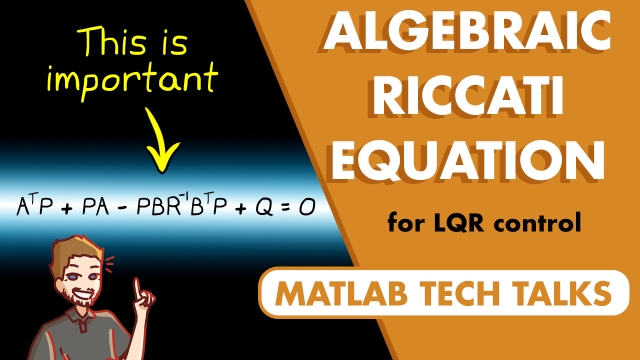
Why the Riccati Equation Is important for LQR Control
14 min
Intermediate
Video
Theory
This Tech Talk looks at an optimal controller called linear quadratic regulator, or LQR, and shows why the Riccati equation plays such an important role in solving it efficiently. The talk...
See More
Data based modeling of nonlinear dynamic systems using System Identification...
Intermediate
Software
Demonstration
Using an engine throttle valve modeling example, this demo shares some perspectives on creation of nonlinear models of dynamic systems from the measurements of its input and outputs. It...
See More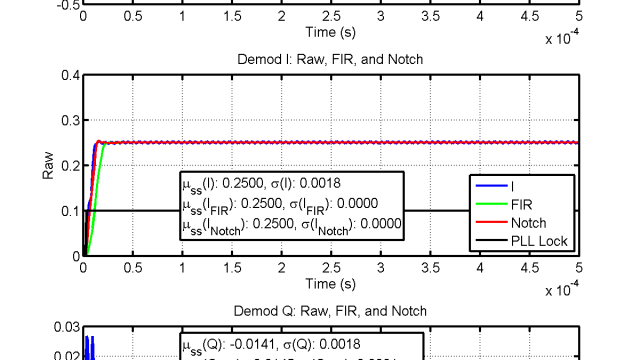
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
60 min
Intermediate
Peer Reviewed Paper
Theory
This paper is a brief tutorial on methods for using modulated signals in feedback loops, and especially of the different methods and trade offs used for demodulating those signals to get...
See More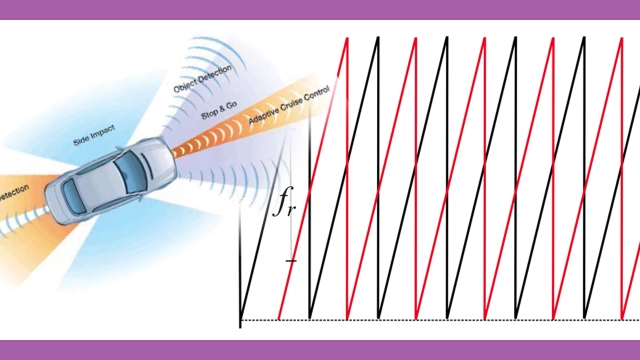
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More
MATLAB Example: Train Multiple Agents for Area Coverage
Intermediate
Example
Application
This example demonstrates a multi-agent collaborative-competitive task in which you train three proximal policy optimization (PPO) agents to explore all areas within a grid-world environment...
See More