

Filters
Type
Experience
Scope
944 items

Benchmarking tools for a priori identifiability analysis
Advanced
Peer Reviewed Paper
Evaluation
Recent review and benchmark of software tools that can be used for assess the structural identifiability of dynamical systems
See More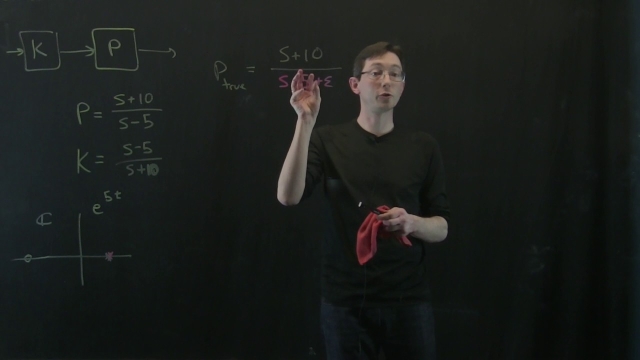
Control Bootcamp: Cautionary Tale About Inverting the Plant Dynamics
5 min
Beginner
Video
Theory
Here we show an example of why it can be a very bad idea to invert some plant dynamics, for example with unstable eigenvalues, for loop shaping.
See More
Video Lectures on Automatic Control
Beginner
Video
Theory
A collection of 32 video lectures on automatic control by Dr. Rajesh Joseph Abraham.
See More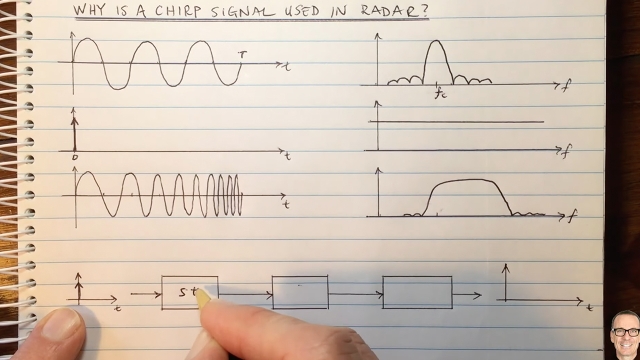
Why is a Chirp Signal used in Radar?
7 min
Beginner
Video
Theory
Gives an intuitive explanation of why the Chirp signal is a good compromise between an impulse waveform and a sinusoidal pulse waveform for radar.
See More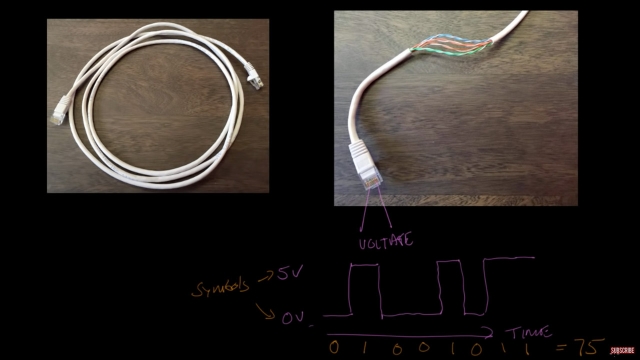
Sending digital information over a wire | Networking tutorial (1 of 13)
4 min
Beginner
Video
Theory
This video lecture is the beginning of an exploration of computer networking with the basics of sending digital information with a copper wire.
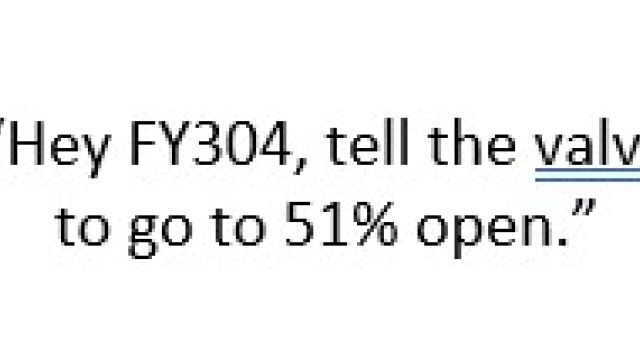
Interpreting Lines on PFDs and P&IDs
20 min
Intermediate
Article / Blog
Application
Lines on a process flow diagram (PFD) indicate material flow. In contrast, on a piping and instrument diagram (P&ID), the control overlay for the PFD, the lines represent information flow. ...
See More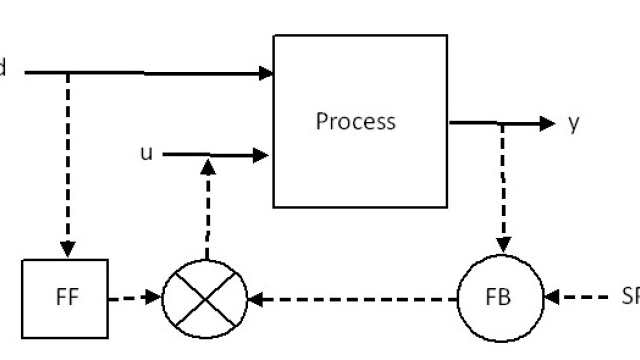
Feedforward Control
15 min
Intermediate
Article / Blog
Application
When and how to use Feedforward Control
See More
Robust Control, Part 4: Working with Parameter Uncertainty
13 min
Beginner
Video
Theory
The previous two videos showed a few different ways to quantify how robust a system is to model and plant uncertainty by looking at how much input and output variation it can handle before...
See More
Learning Dynamic Systems & Control Engineering with a Video Game
Intermediate
Video
Demonstration
Engineering Students at Northern Illinois University are learning one of their core subjects, Dynamic Systems & Control, with the aid of a video game.
See More
PID Controller Implementation in Software
20 min
Intermediate
Video
Application
How to implement a PID controller in software using C, discussing theory and practical considerations. Demonstration of PID controller code using a custom flight simulator.
See More
MATLAB Scripts for video "Linear System Identification | System Identificati...
Intermediate
Software
Demonstration
This Github repo contains the data files and MATLAB scripts that were used in the MATLAB Tech Talk video "Linear System Identification | System Identification, Part 2"
See More
Nathan Kutz:"Data-driven Discovery of Governing Physical Laws"
73 min
Intermediate
Video
Theory
Seminar by Dr.Nathan Kutz on "Data-driven Discovery of Governing Physical Laws" on 10/31/2018 CICS Seminar Series
See More
Data-Driven Control: Linear System Identification
20 min
Beginner
Video
Theory
Overview lecture on linear system identification and model reduction. This lecture discusses how we obtain reduced-order models from data that optimally capture input--output dynamics.
See More
Yann LeCun’s Deep Learning Course at CDS
Intermediate
Course
Theory
This course concerns the latest techniques in deep learning and representation learning, focusing on supervised and unsupervised deep learning, embedding methods, metric learning...
See More
Multi-agent reinforcement learning: An overview
Intermediate
Peer Reviewed Paper
Theory
From the abstract:
Multi-agent systems can be used to address problems in a variety of do- mains, including robotics, distributed control, telecommunications, and economics. The complexity...
See More
1D Kinematics - Speed, Velocity, Acceleration
51 min
Beginner
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
MATLAB Discovery Page - Visual Inspection
Beginner
Article / Blog
Theory
Visual inspection is the image-based inspection of parts where a camera scans the part under test for both failures and quality defects. Automated inspection and defect detection are...
See More
Machine Learning: What is easy, medium, and hard?
38 min
Beginner
Video
Theory
This video gives a brief overview of what is easy, medium, and hard in machine learning, explored through case studies. Progress in machine learning is rapidly advancing, and changing the...
See More
The Braitenberg Vehicles
15 min
Beginner
Video
Theory
This video explores the world of simple logical robots as described by Valentino Braitenberg in his book Vehicles, Experiments in Synthetic Psychology. With very simple linkages between...
See More
Nonlinear System Identification | System Identification, Part 3
17 min
Beginner
Video
Theory
Learn about nonlinear system identification by walking through one of the many possible model options: A nonlinear ARX model. Brian Douglas covers the importance of adding an offset term to...
See More
What are Phased Arrays?
17 min
Beginner
Video
Theory
This video introduces the concept of phased arrays. An array refers to multiple sensors, arranged in some configuration, that act together to produce a desired sensor pattern. With a phased...
See More
Post-Pandemic: A Hybrid Lab Experience
Beginner
Article / Blog
Application
This article discusses the importance of a hybrid laboratory model, blending physical hardware with digital twins. Example using the Quanser Interactive Lab (QLabs) platform is given.
See More
Vibrational control of nonlinear systems: Vibrational controllability and tr...
Intermediate
Peer Reviewed Paper
Theory
In the first part of this work, the criteria for the existence of stabilizing parametric oscillations have been derived. In the present paper, the problem of choosing the stabilizing...
See More
Gain Scheduling (Pre-programmed Controller Parameter Adjustment)
Intermediate
Article / Blog
Application
Process gain and time-constants change with operating flow rate, tank levels, temperatures, etc. This often requires re-tuning of the controller coefficient values. However, once done...
See More
Interactive Course for Control Theory
Beginner
Course
Theory
Control Theory is a topic that finds a widespread application throughout engineering and natural sciences. It is very common in electrical, mechanical and process engineering. Especially...
See More