

Filters
Type
Experience
Scope
944 items

Solving Systems of Equations Using the Optimization Penalty Method
44 min
Beginner
Video
Theory
In this video we show how to solve a system of equations using numerical optimization instead of analytically solving. We show that this can be applied to e...
See More
Measurements, Transmission Signals, and Issues
45 min
Intermediate
Article / Blog
Application
This is an introduction to scaled information transmission signals (for example 4-20 mA, 3-15 psig, etc.), the actual sensed signals (like using orifice dP to infer flow rate, or temperature...
See More
Quanser QUBE-Servo 2: Low-cost Teaching Platform for Controls
Beginner
Hardware
Application
The Quanser QUBE-Servo 2 is a fully integrated, modular servomotor lab experiment designed for teaching mechatronics and control concepts at the undergraduate level. Ideal for teaching speed...
See More
DSP Lecture 1: Signals
66 min
Beginner
Video
Theory
This is a video lecture for ECSE-4530 Digital Signal Processing by Rich Radke, Rensselaer Polytechnic Institute.
See More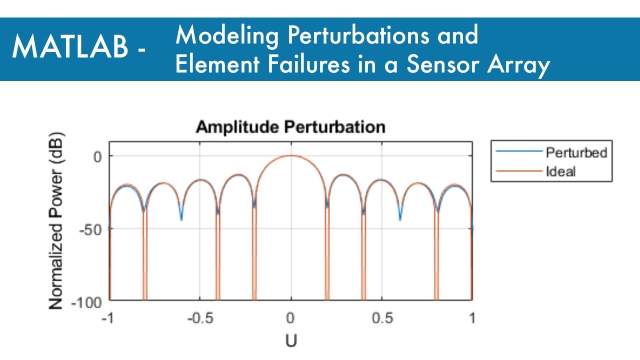
Modeling Perturbations and Element Failures in a Sensor Array
Beginner
Example
Demonstration
This MATLAB example shows how to model amplitude, phase, position and pattern perturbations as well as element failures in a sensor array.
See More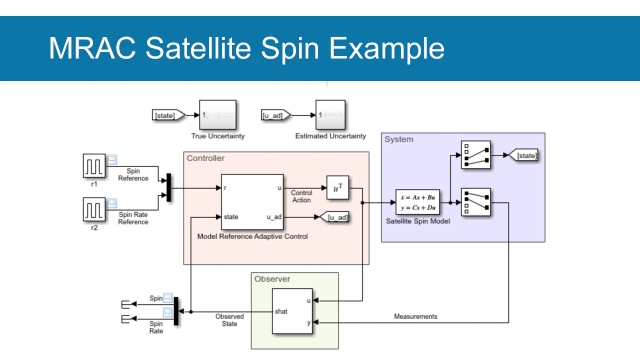
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More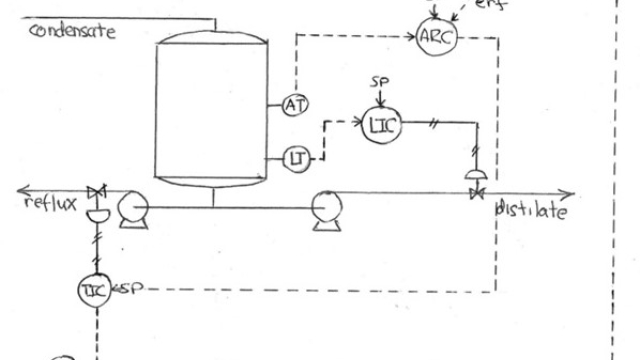
Cascade Control
15 min
Intermediate
Article / Blog
Application
When and how to use Cascade Control
See More
CS224n: Natural Language Processing with Deep Learning | Winter 2021
Beginner
Course
Theory
This course covers the foundations of the effective modern methods for deep learning applied to NLP, a big picture understanding of human languages and the difficulties in understanding and...
See More
Dealing with Non-Stationarity in Multi-Agent Deep Reinforcement Learning
Intermediate
Peer Reviewed Paper
Theory
From the abstract
Recent developments in deep reinforcement learning are concerned with creating decision-making agents which can perform well in various complex domains. A particular...
See More
Wind Tunnel Data Analysis and Testing Considerations
111 min
Intermediate
Video
Theory
This is the last video in our 3 part series on wind tunnel testing. In this video, we discuss what typical plots of wind tunnel data might look like and how to extract relevant information...
See More
Vectors, Dot Products, Cross Products - 3D Kinematics
50 min
Beginner
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More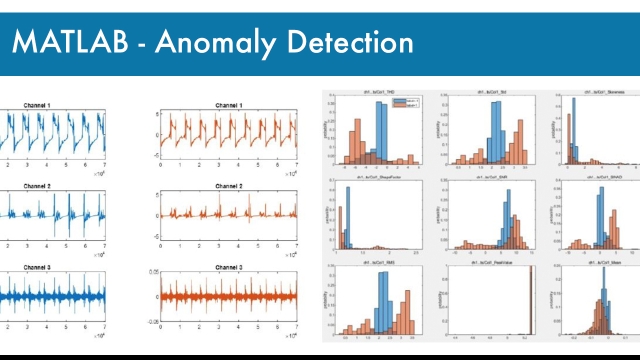
MATLAB Discovery Page - Anomaly Detection
Beginner
Article / Blog
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. Anomaly detection can range from simple outlier detection to complex machine learning...
See More
Control Systems in Practice, Part 5: A Better Way to Think About a Notch Fil...
13 min
Beginner
Video
Theory
This video describes an intuitive way to approach notch filter design by thinking about the problem as an inverted, lightly damped, second-order low-pass filter. Then, two additional poles...
See More
Online and Recursive System Identification | System Identification, Part 4
19 min
Beginner
Video
Theory
Online system identification algorithms estimate the parameters and states of a model as new data is measured and available in real-time or near real-time. Brian Douglas covers what online...
See More
Jupyter Notebook: Code used to generate vibrational control of inverted pend...
Intermediate
Software
Demonstration
Jupyter Notebook: Code used to generate vibrational control of inverted pendulum figures
See More")
Robotic Car - How to read Gyro Datasheets (Part 1)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this first part I go through the mechanical characteristics of a MEMS gyro and...
See More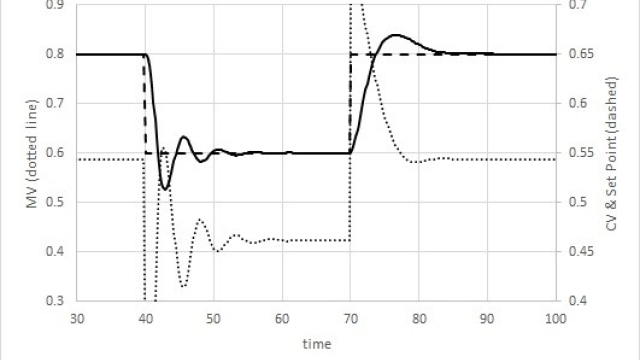
Tuning PID Controllers
20 min
Intermediate
Article / Blog
Application
Tuning controllers is the procedure for choosing the coefficient values for the P, I and D modes. It must be simple to execute, fast, and non-disruptive to the operating process. Heuristic...
See More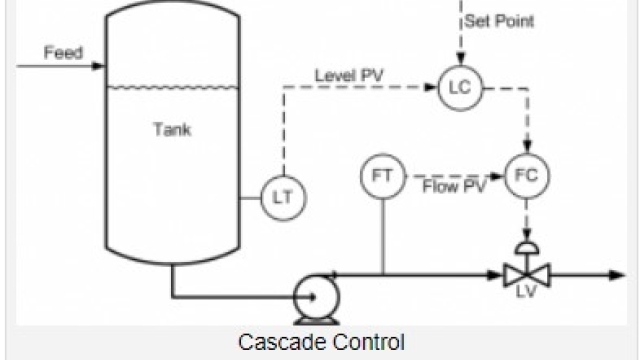
Cascade Control
30 min
Intermediate
Article / Blog
Application
What is Cascade Control and why use it?
See More
System Identification: DMD Control Example
8 min
Intermediate
Video
Theory
This lecture gives a Matlab example of dynamic mode decomposition with control (DMDc) for full-state system identification.
See More
First Order Plus Dead Time Tuning App for PI Controllers
Intermediate
App
Application
The FOPTD_PI Tool is a Matlab-Interactive tuning tool of PI controllers for First Order PlusTime Delay processes. It can be used to teach basic control concepts based on a set of PI tuning...
See More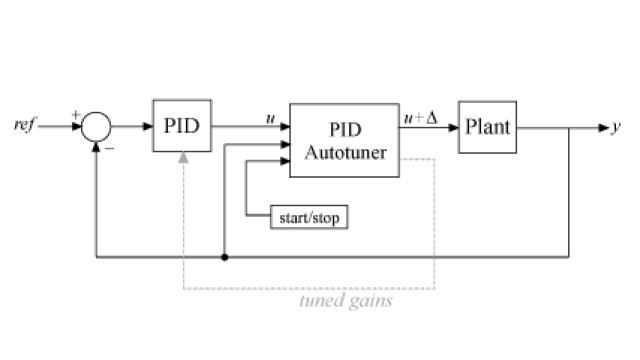
Online Tuning using Simulink’s Closed-Loop PID Autotuner Block
30 min
Intermediate
Article / Blog
Application
Learn how to conduct an online tuning of a PI-speed controller using the MATLAB/Simulink Closed-Loop PID Autotuner Block. Tuned controller is validated on a Quanser QLabs Virtual QUBE-Servo...
See More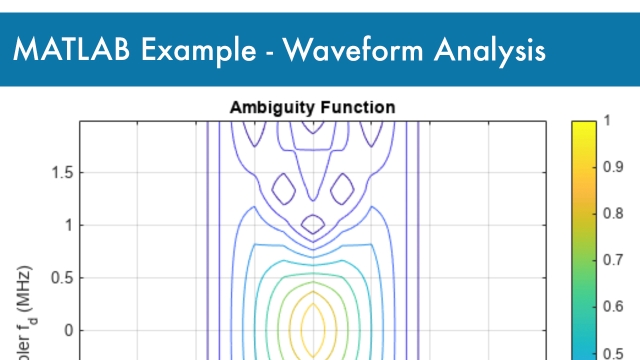
MATLAB Example: Waveform Analysis Using the Ambiguity Function
Intermediate
Example
Application
This example shows how to use the ambiguity function to analyze waveforms. It compares range and Doppler capabilities of several common pulsed waveforms such as the rectangular waveform, the...
See More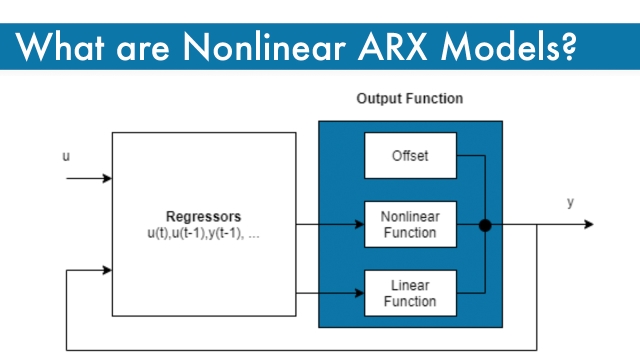
What are Nonlinear ARX Models?
Intermediate
Article / Blog
Theory
This Mathworks page provides an overview of Nonlinear ARX Models.Nonlinear ARX models extend the linear ARX models to the nonlinear case. The structure of these models enables you to model...
See More
Autonomous Navigation, Part 3: Understanding SLAM Using Pose Graph Optimizat...
16 min
Beginner
Video
Theory
This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous localization and mapping (SLAM) problem in autonomous navigation.
We’ll...
See More
Systems Engineering, Part 5: Some Benefits of Model-Based Systems Engineerin...
12 min
Beginner
Video
Theory
Learn how model-based systems engineering (MBSE) can help you cut through the chaos of early systems development and get you from definition to execution more seamlessly.
You’ll hear the...
See More