

Filters
Type
Experience
Scope
944 items
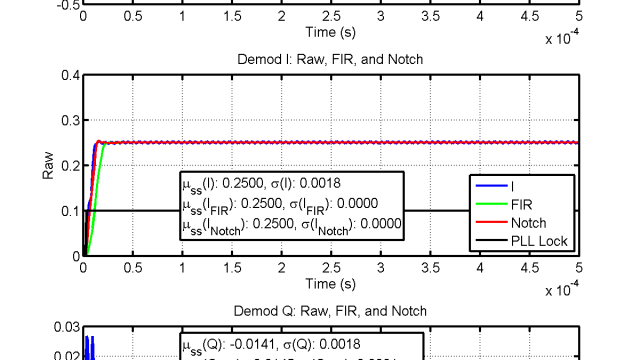
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
60 min
Intermediate
Peer Reviewed Paper
Theory
This paper is a brief tutorial on methods for using modulated signals in feedback loops, and especially of the different methods and trade offs used for demodulating those signals to get...
See More
Controlling Robotic Swarms
13 min
Beginner
Video
Theory
Come with me to the Robotics, Aerospace, and Information Networks lab at the University of Washington to learn the basics of swarm robotics. Find out how simple distributed algorithms can...
See More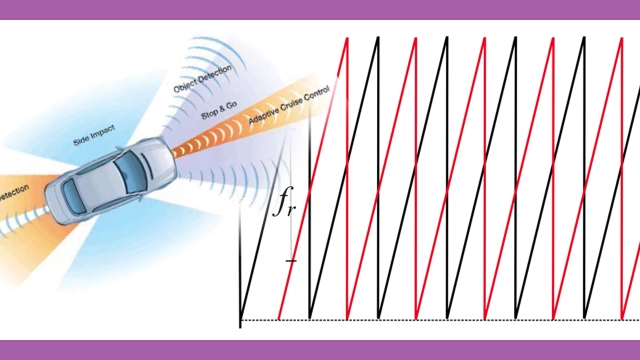
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More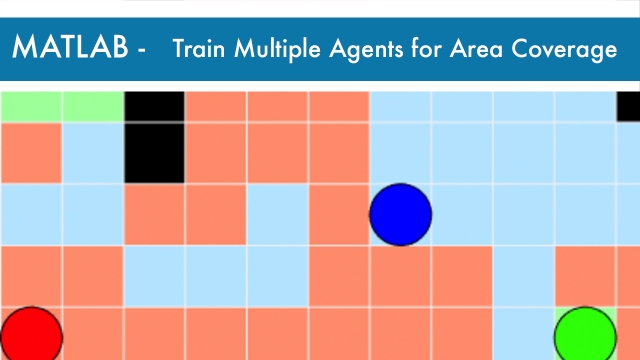
MATLAB Example: Train Multiple Agents for Area Coverage
Intermediate
Example
Application
This example demonstrates a multi-agent collaborative-competitive task in which you train three proximal policy optimization (PPO) agents to explore all areas within a grid-world environment...
See More
Feedback Systems: An Introduction for Scientists and Engineers
Beginner
Book
Theory
This is the wiki for the text Feedback Systems (second edition) by Karl J. Åström and Richard M. Murray. On this resource you will find the complete text of the book as well as additional...
See More
Projectile Motion Practice Problems
28 min
Intermediate
Video
Application
In this video, practice along questions on an important topic of Kinematics i.e Projectile Motion. Practicing would help you remember the concepts and also understand them better.
See More
Autonomous Navigation, Part 1: What is Autonomous Navigation?
11 min
Beginner
Video
Theory
Navigation is the ability to determine your location within an environment and to be able to figure out a path that will take you to a goal. This video provides an overview of how we get a...
See More
Minami's Control School (Japanese)
Beginner
Video
Theory
教員のみなみゆうきです.専門は制御工学です.制御工学は「モノの動きをデザインする科学」です.制御工学を勉強したいという方に,僕の知識をすこしでも届けられると良いなと思い,YouTubeをやっています.
2019年の秋,講義ノートの作成の様子を撮影し,YouTubeに動画をアップロードしたのを契機として,動画作成をはじめました...
See More
Sprint - Test Flight 8 and Data Review
17 min
Beginner
Video
Application
This video is part of a series that details the design, build, and test of Sprint - a thrust vector controlled model rocket by Joe Barnard of BPS Space.
See More
Lectures on Modelling and Control of Dynamic Systems (French)
Beginner
Article / Blog
Theory
Lectures on Modelling and Control of Dynamic Systems from Patrick Lanusse of Bordeaux INP, France.
See More
Adaptive Control (Part I) — Hypersonics and the MIT Rule
Intermediate
Article / Blog
Theory
This blog post introduces the algorithm that ruled the adaptive flight control system of the first manned hypersonic aircraft, the North American X-15.
See More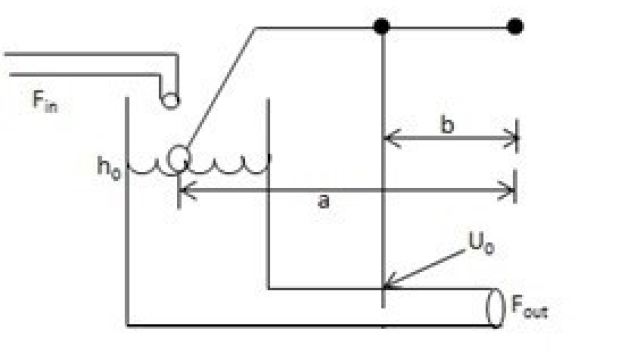
Understanding P, I, and D
30 min
Intermediate
Article / Blog
Theory
Understanding what the proportional, integral, and derivative terms do within the PID controller is essential to choose appropriate action, trouble shoot controllers, chose appropriate...
See More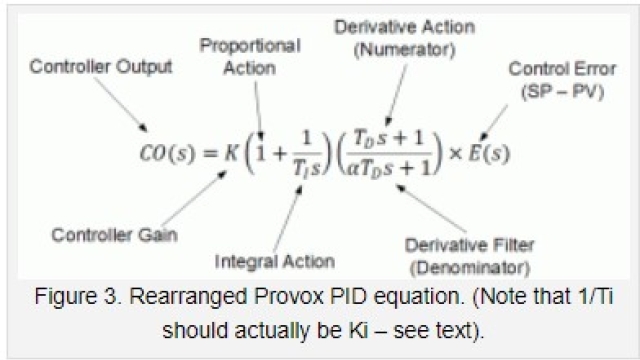
Decoding a Laplace Representation of a Controller
20 min
Intermediate
Article / Blog
Application
A how to relate the Laplace notation to the PID controller variation and features
See More
Simulink Onramp
120 min
Beginner
Tutorial
Demonstration
Learn the basics of how to create, edit, and simulate models in Simulink®. Use block diagrams to represent real-world systems and simulate components and algorithms.
See More
Robotic Car - A Simple Way to Build a Model
15 min
Beginner
Video
Theory
You don't always have to work out the math in order to build up a model of your system. Sometimes generating a model is as easy as running a simple test and inspecting the results. I show...
See More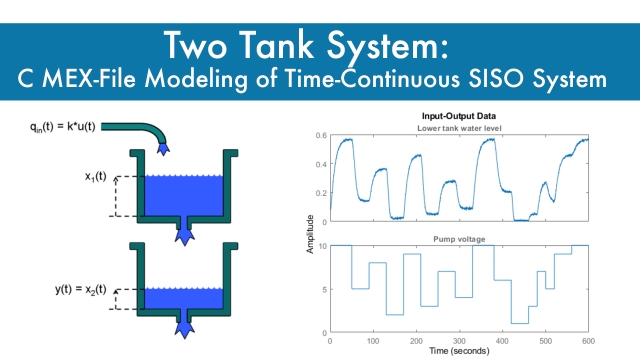
Two Tank System: C MEX-File Modeling of Time-Continuous SISO System
Intermediate
Software
Demonstration
This MATLAB example shows how to perform IDNLGREY modeling based on C MEX model files. It uses a simple system where nonlinear state space modeling really pays off.
See More
What Is a Control System and Why Should I Care? (Part 1)
38 min
Beginner
Video
Demonstration
This video is the first of a two part series. It in introduces the basic concepts of feedback with lots of visual examples. The idea is to show that not only are these principles...
See More
Model-Based Reinforcement Learning: Theory and Practice
Intermediate
Article / Blog
Theory
Blog post by Michael Janner of Berkeley Artificial Intelligence Research on model-based reinforcement learning.
See More
Computer Aids for Chemical Engineering
Beginner
Article / Blog
Theory
A curated list of resources for Chemical Engineering students. The resources include syllabi, schedules, course notes, textbooks, screencasts, software, hardware, and other useful links.
See More
Systems Engineering, Part 3: The Benefits of Functional Architectures
14 min
Beginner
Video
Theory
Functional, logical, and physical architectures are important tools for designing complex systems. We describe what architectures are and how they contribute to the early stages of a project...
See More
Advanced process control (APC): Theory & Applications in SAGD
Intermediate
Video
Theory
This webinar is presented by Thiago Avila and covers what APC is, why we do it, examples of APC in the SAGD industry, what optimization opportunities are available, and where this technology...
See More
Introduction to Radar Systems: Target Radar Cross Section
Beginner
Presentation
Theory
This course is presented by Robert M. O'Donnell, a former researcher at MIT Lincoln Laboratory, and is designed to instill a basic working knowledge of radar systems.
The set of 10 lectures...
See More
MATLAB Example: Waveform Analysis Using the Ambiguity Function
Intermediate
Example
Application
This example shows how to use the ambiguity function to analyze waveforms. It compares range and Doppler capabilities of several common pulsed waveforms such as the rectangular waveform, the...
See More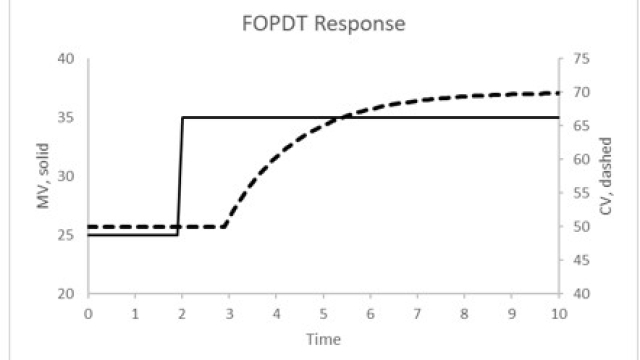
Use First-Principles Modeling to Get FOPDT Coefficient Values
30 min
Intermediate
Article / Blog
Application
Conventionally, we obtain model coefficient values by open-loop step-testing of the process; but this creates undesirable process upsets, and only reveals the local process behavior. This...
See More
Control Bootcamp: Observability Example in Matlab
8 min
Beginner
Video
Application
This video explores observability in Matlab on the example system of an inverted pendulum on a cart.
See More