

Filters
Type
Experience
Scope
944 items

Simulating the Logistic Map in Matlab
16 min
Intermediate
Video
Application
This video shows how simple it is to simulate discrete-time dynamical systems, such as the Logistic Map, in Matlab.
See More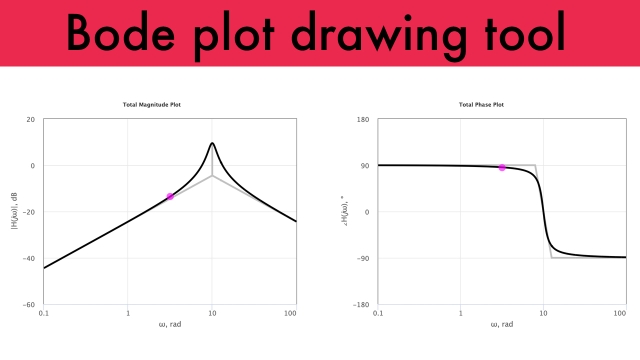
Bode Plot Drawing Tool
Intermediate
Article / Blog
Demonstration
This page demonstrates the techniques described previously to take a transfer function defined by the user, identify the constituent terms, draw the individual Bode plots, and then combine...
See More
Linearizing a Simulink Model Using the Linear Analysis Tool and ‘linmod’
55 min
Beginner
Video
Application
In this video we show how to linearize a non-linear Simulink model using numerical techniques. This approach is extremely powerful as it allows automatic ge...
See More
CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
10 min
Beginner
Video
Theory
I explain how to determine the straight-line estimate of the Bode Plot for a second order transfer function with a pair of complex poles. This video is a repeat of the last half of the Bode...
See More
Machine Learning - Andrew Ng, Stanford University
Beginner
Video
Theory
Machine learning is the science of getting computers to act without being explicitly programmed. In the past decade, machine learning has given us self-driving cars, practical speech...
See More
Time Domain Analysis with Matlab: Using the Linear System Analyzer
37 min
Beginner
Video
Theory
In this video we explore various Matlab functions and workflows to perform time domain analysis of a dynamic system. This includes the use of ‘tf’, ‘step’, ...
See More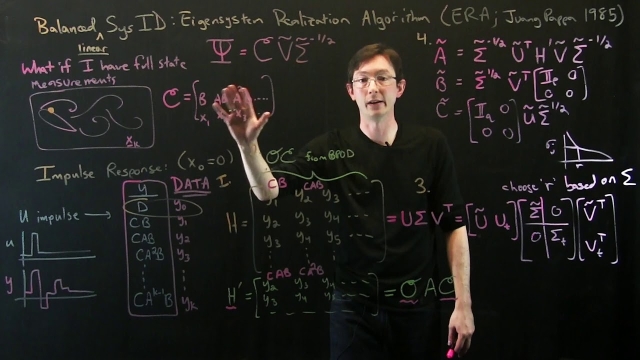
Data-Driven Control: Balanced Models with ERA
6 min
Intermediate
Video
Theory
In this lecture, we connect the eigensystem realization algorithm (ERA) to balanced proper orthogonal decomposition (BPOD). In particular, if enough data is collected, then ERA produces...
See More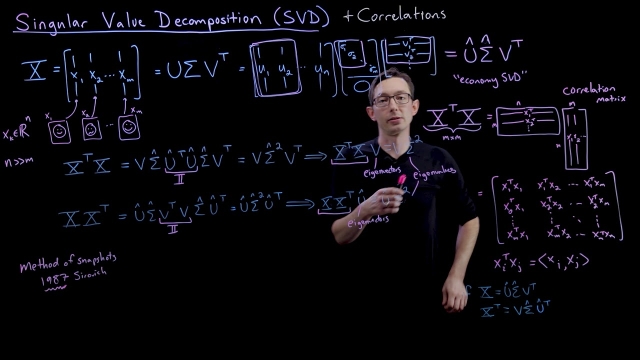
SVD Method of Snapshots
4 min
Beginner
Video
Theory
This video describes how to compute the singular value decomposition (SVD) using the method of snapshots, by Sirovich 1987.
See More
Posicast Control 2 - ( In English )
5 min
Beginner
Video
Theory
This video is about the Half-Cycle Posicast. It includes some hints about how to simulate this type of control using Simulink
See More
Derivation of the Heat Equation
31 min
Beginner
Video
Theory
In this video, we derive the heat equation. This partial differential equation (PDE) applies to scenarios such as the transfer of heat in a uniform, homogen...
See More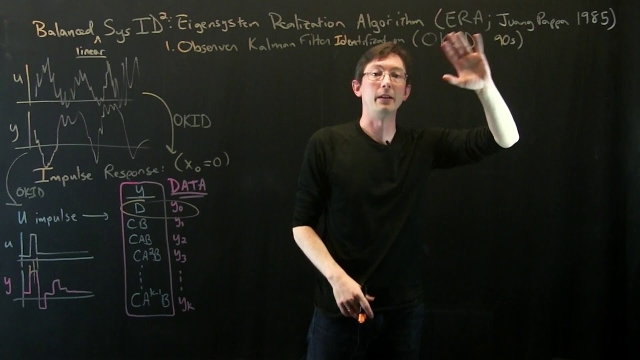
Data-Driven Control: Observer Kalman Filter Identification
12 min
Intermediate
Video
Theory
In this lecture, we introduce the observer Kalman filter identification (OKID) algorithm. OKID takes natural input--output data from a system and estimates the impulse response, for later...
See More
Unitary Transformations
12 min
Beginner
Video
Theory
This video discusses unitary matrix transformations and how they relate to the geometry of the singular value decomposition (SVD).
See More
Peter Ponders PID - LQR Optimizing Two Outputs
16 min
Beginner
Video
Theory
Euler (Gimbal Lock) Explained
8 min
Beginner
Video
Theory
In this video we explore Euler Rotations, the most common method for orienting objects in 3d. It's by-product "gimbal lock" can cause headaches for animators because the animated motion can...
See More")
Frequency domain – tutorial 1: concept of frequency (with Chinese subtitle)
9 min
Beginner
Video
Theory
In this video, the following materials are covered:1) intuitive explanation on the frequency concept 2) what is the relation between time and frequency domai...
See More
Trimming a Model of a Dynamic System Using Numerical Optimization
60 min
Intermediate
Video
Theory
In this video we show how to find a trim point of a dynamic system using numerical optimization techniques. We generate a cost function that corresponds to a straight and level flight...
See More
Drone Simulation and Control, Part 3: How to Build the Flight Code
18 min
Beginner
Video
Theory
This video describes how to create quadcopter flight software from the control architecture developed in the last video. It covers how to process the raw sensor readings and use them with...
See More![Linear Systems [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_441.jpg?itok=5LYUu0Zj "Linear Systems [Control Bootcamp]")
Linear Systems [Control Bootcamp]
24 min
Beginner
Video
Theory
Linear systems of ordinary differential equations are analyzed using eigenvalues and eigenvectors. This will be the mathematical foundation of this bootcamp on linear control theory.
See More
Peter Ponders PID - Controlling a non-integrating single pole system. Part 3...
9 min
Beginner
Video
Theory
Part 3 uses PI control which is the only practical means of control a non-integrating single pole system.http://deltamotion.comhttp://forum.deltamotion.com
See More
Frequency domain – tutorial 5: Fourier transform
9 min
Beginner
Video
Theory
In this video, we learn about Fourier transform which enables us to travel from time to frequency domain when a signal is not periodic. The learning objectiv...
See More
Design of Embedded Robust Control Systems Using MATLAB®/Simulink®
Intermediate
Book
Demonstration
Robust control theory allows for changes in a system whilst maintaining stability and performance. Applications of this technique are very important for dependable embedded systems, making...
See More
Final Value Theorem and Steady State Error
12 min
Beginner
Video
Theory
This Final Value Theorem is a way we can determine what value the time domain function approaches at infinity but from the S-domain transfer function. This is very helpful when we're trying...
See More
Types of Machine Learning 1
6 min
Beginner
Video
Theory
This lecture gives an overview of the main categories of machine learning, including supervised, un-supervised, and semi-supervised techniques, depending on the availability of expert labels...
See More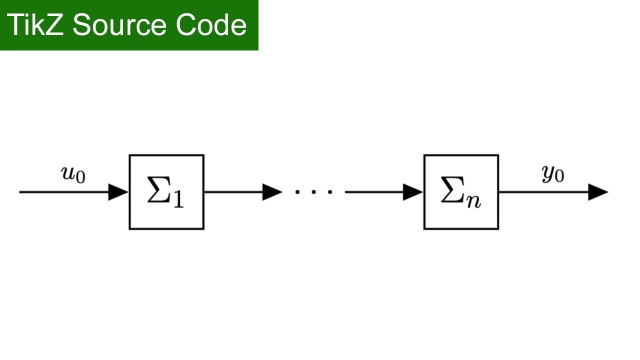
TikZ source Code: Cascade of several subsystems
Beginner
Source Code
Application
TikZ source Code: Cascade of several subsystems.
See More
Second Order Dynamics in Process Control
17 min
Beginner
Video
Theory
How do we simulate two first order transfer functions in series, a inherently second order system, or two coupled differential equations? Tune in to find out!
See More