

Filters
Type
Experience
Scope
944 items
Vector Derivatives (the Equation of Coriolis) and the Angular Velocity Vecto...
72 min
Intermediate
Video
Theory
In this video we develop the Equation of Coriolis which describes how a vector in a rotating reference frame changes from the perspective of an observer in a non-rotating reference frame. We...
See More
Lecture 29: State space representation
29 min
Beginner
Video
Theory

Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More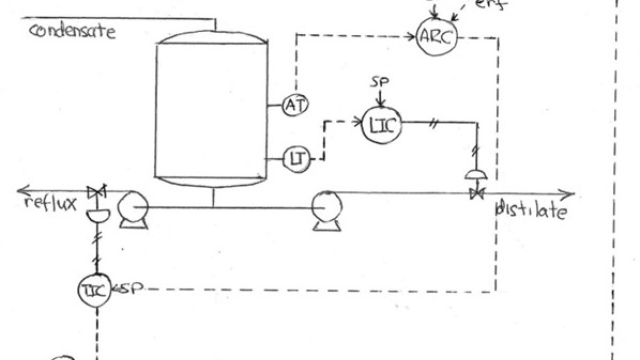

Cascade Control Intro
8 min
Beginner
Video
Theory
How can we improve the disturbance rejection of our controllers using additional, relevant measurements? Tune in to find out!
See More
Lecture 19: Lead and PD compensator Design using Root Locus
54 min
Beginner
Video
Theory

Laplace domain – tutorial 6: Transfer function & system properties
24 min
Beginner
Video
Theory
In this video, we learn about transfer function and system properties. The following materials are covered:1) what is a transfer function?2) relation between...
See More
Peter Ponders PID-Fuzzy Logic vs PID
10 min
Beginner
Video
Theory
There are many academic and engineering papers showing how good fuzzy logic control is relative to PID control. Every FL vs PID paper I have seen compares...
See More
Understanding PID Control, Part 3: Expanding Beyond a Simple Derivative
11 min
Beginner
Video
Theory
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models. Noise is generated by sensors and is present in...
See More
Dynamic Modeling in Process Control
14 min
Beginner
Video
Theory
I'll show you how we can build the dynamic models necessary to derive process transfer functions as an introduction to process control.
See More
Lecture 14: Routh Hurwitz Criterion
22 min
Beginner
Video
Theory

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 16 - Monte Ca...
67 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
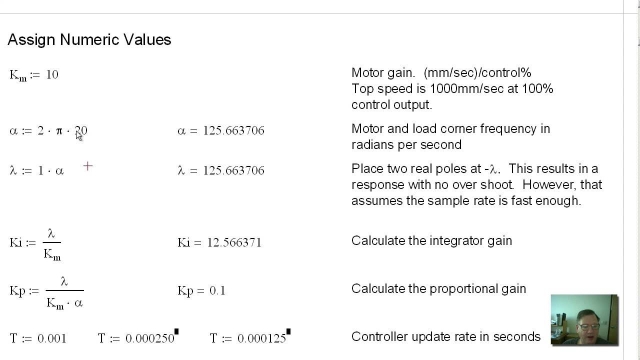
Peter Ponders PID - T0P1 Part 4, Misc Topics
20 min
Beginner
Video
Theory
This video covers another way to compute symbolic gains, the difference between having the P gain act on the error or just the feedback, extending bandwidt...
See More
RL Course by David Silver - Lecture 4: Model-Free Prediction
97 min
Intermediate
Video
Theory
An introduction to Monte-Carlo Learning and Temporal Difference Learning
See More
Peter Ponders PID - Root Locus Is Useless
25 min
Beginner
Video
Theory

Robotic Car, Closed Loop Control Example
13 min
Beginner
Video
Application
I demonstrate the value of closed loop control in an uncertain environment using my Zumo Robot car. If you're interested in building one yourself and trying this out I think I've given you...
See More
The Taylor Series
84 min
Beginner
Video
Theory
In this video we discuss the Taylor Series (and the closely related Maclaurin Series). These are two specific types of Power Series that allow you to approx...
See More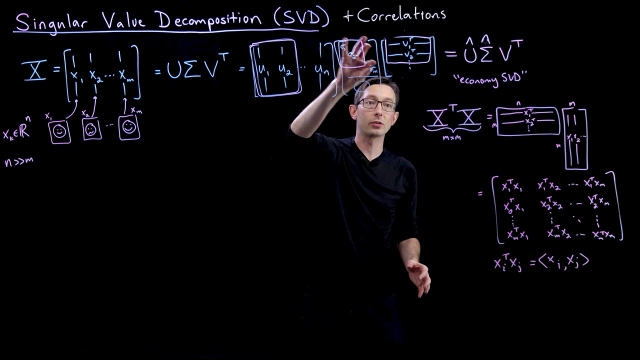
Singular Value Decomposition (SVD): Dominant Correlations
11 min
Intermediate
Video
Theory
This lectures discusses how the SVD captures dominant correlations in a matrix of data.
See More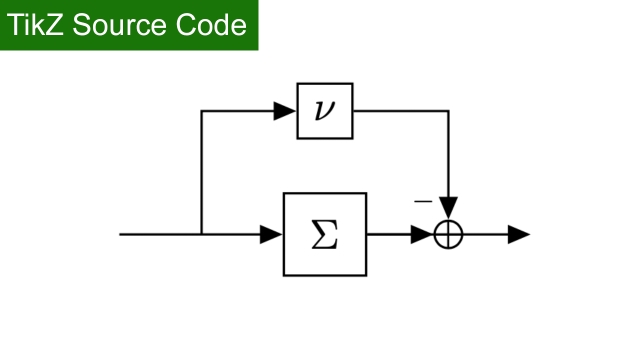
TikZ source Code: Feedforward passivity index
Beginner
Source Code
Application
TikZ source Code: Feedforward passivity index
See More
Understanding Sensor Fusion and Tracking, Part 1: What Is Sensor Fusion?
12 min
Beginner
Video
Theory
This video provides an overview of what sensor fusion is and how it helps in the design of autonomous systems. It also covers a few scenarios that illustrate the various ways that sensor...
See More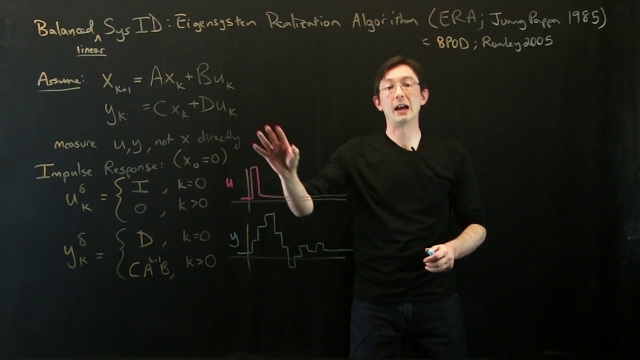
Data-Driven Control: Eigensystem Realization Algorithm
12 min
Intermediate
Video
Theory
In this lecture, we introduce the eigensystem realization algorithm (ERA), which is a purely data-driven algorithm to obtain balanced input—output models from impulse response data. ERA was...
See More![SVD: Image Compression [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_420.jpg?itok=m_mtp3IT)
SVD: Image Compression [Python]
9 min
Beginner
Video
Application
This video describes how to use the singular value decomposition (SVD) for image compression in Python.
See More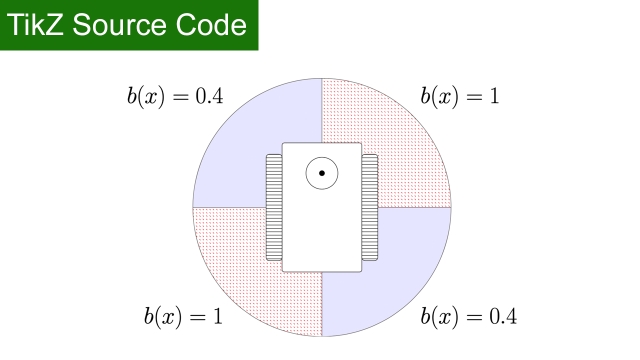
TikZ source Code: Mobile Robot Slip
Beginner
Source Code
Application
TikZ source Code: Mobile Robot Slip
See More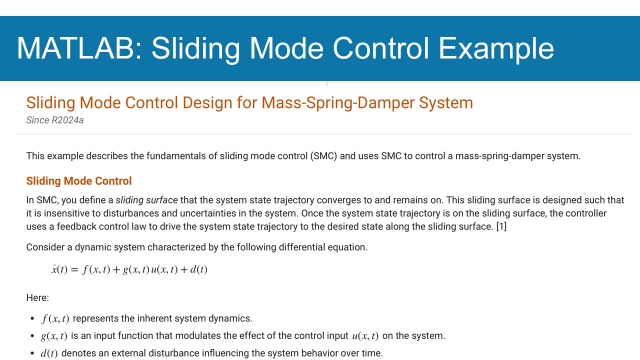
Sliding Mode Control Design for Mass-Spring-Damper System
Intermediate
Example
Application
This MATLAB/Simulink example describes the fundamentals of sliding mode control (SMC) and uses SMC to control a mass-spring-damper system.
See More![Linear Regression 1 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_436.jpg?itok=dYATpI15 "Linear Regression 1 [Python]")
Linear Regression 1 [Python]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 1).
See More