

Filters
Type
Experience
Scope
944 items

Lecture 5: Block Diagram Reduction
46 min
Beginner
Video
Theory

PID Control - A brief introduction
7 min
Beginner
Video
Theory
In this video, I introduce the topic of PID control. This is a short introduction design to prepare you for the next few lectures where I will go through several examples of PID control....
See More
Second Order Dynamics
3 min
Beginner
Video
Theory
A crash course overview on second order dynamics in the frequency domain, what the key parameters are, and why they matter.
See More
Frequency domain – tutorial 4: Gibbs phenomenon
4 min
Beginner
Video
Theory
In this video, we quickly review the Gibbs phenomenon which involves two facts:1) Fourier sums overshoot at a jump discontinuity2) overshoot does not disapp...
See More
Peter Ponders PID - Simulation Methods, Which is Best?
22 min
Beginner
Video
Theory

Lectures on Adaptive Control and Learning by Tansel Yucelen
Beginner
Video
Theory
A serie of lectures on the topic of adaptive controllers.
See More
Lecture 15: Root Locus
53 min
Beginner
Video
Theory

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 7 - Imitation...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More
Peter Ponders PID - System Identification Basics
11 min
Beginner
Video
Theory

Lecture 1 Introduction to Automatic Control
29 min
Beginner
Video
Theory

Sketching Root Locus Part 1
13 min
Beginner
Video
Theory
Sketching a root locus by hand can be done by following some simple rules. However, more important than actually being able to sketch to plot is being able to use our knowledge to design...
See More
Numerically Linearizing a Dynamic System
104 min
Beginner
Video
Theory
In this video we show how to linearize a dynamic system using numerical techniques. In other words, the linearization process does not require an analytical...
See More
Overview of Dempster-Shafer Theory (Evidence Theory)
Beginner
Article / Blog
Theory
This is an overview of Dempster-Shafer Theory (Evidence Theory) that provides an introduction, definition, basic information about combination rules, some issues with the theory, and the...
See More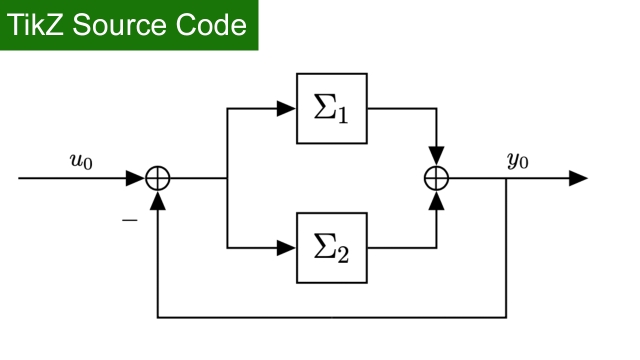
TikZ source Code: Feedback systems
Beginner
Source Code
Application
TikZ source Code: Feedback systems
See More
CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
10 min
Beginner
Video
Theory
I explain how to determine the straight-line estimate of the Bode Plot for a second order transfer function with a pair of complex poles. This video is a repeat of the last half of the Bode...
See More
Control Bootcamp: Full-State Estimation
11 min
Beginner
Video
Theory
This video describes full-state estimation. An estimator dynamical system is constructed, and it is shown that the estimate converges to the true state. Further, the eigenvalues of the...
See More
Partial Fraction Expansion/Decomposition
59 min
Beginner
Video
Theory
In this video we discuss how to perform partial fraction expansion (PFE) to rewrite a ratio of polynomials as simpler expressions. Topics and time stamps:(0...
See More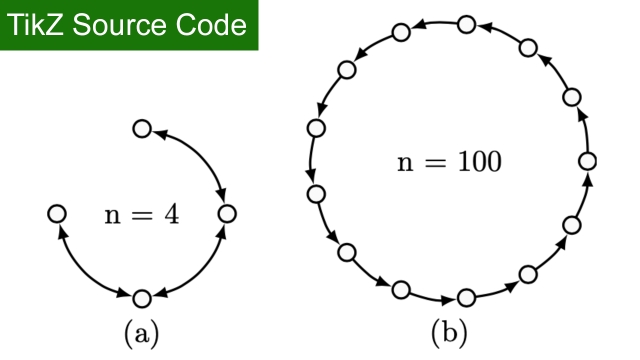
TikZ source Code: Simulation Graph
Beginner
Source Code
Application
TikZ source Code: Simulation Graph
See More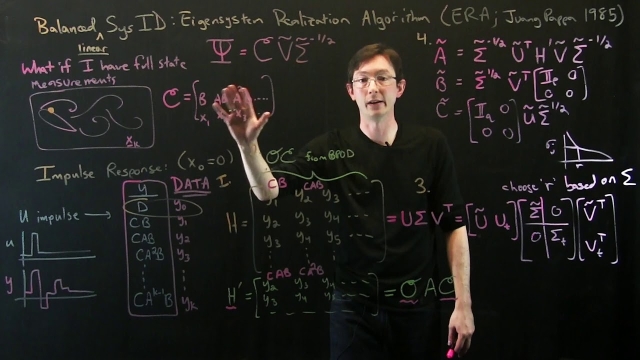
Data-Driven Control: Balanced Models with ERA
6 min
Intermediate
Video
Theory
In this lecture, we connect the eigensystem realization algorithm (ERA) to balanced proper orthogonal decomposition (BPOD). In particular, if enough data is collected, then ERA produces...
See More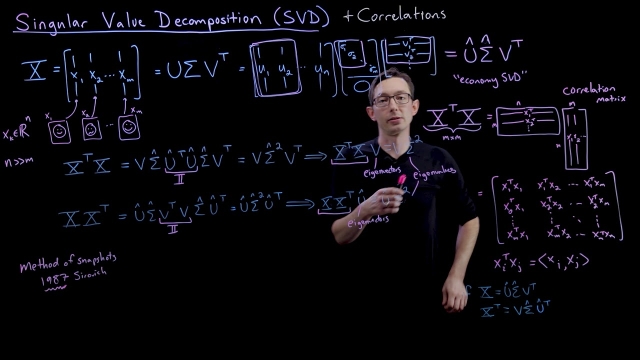
SVD Method of Snapshots
4 min
Beginner
Video
Theory
This video describes how to compute the singular value decomposition (SVD) using the method of snapshots, by Sirovich 1987.
See More
Bode Plots of Complex Transfer Functions
65 min
Beginner
Video
Theory
In this video we discuss how to generate a bode plot of a complex transfer function by decomposing it into the individual components. We then show how one c...
See More
What Is a Control System and Why Should I Care? (Part 1)
38 min
Beginner
Video
Application
This talk introduces the basic concepts of feedback with lots of visual examples.
See More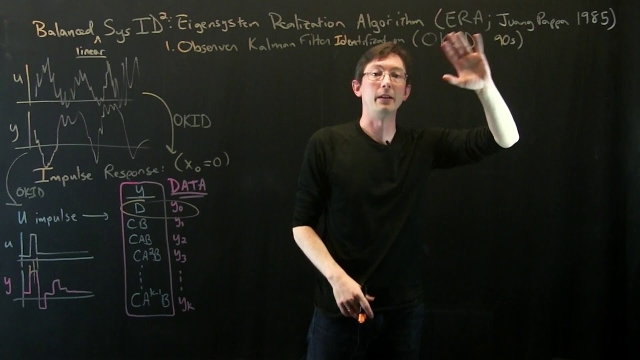
Data-Driven Control: Observer Kalman Filter Identification
12 min
Intermediate
Video
Theory
In this lecture, we introduce the observer Kalman filter identification (OKID) algorithm. OKID takes natural input--output data from a system and estimates the impulse response, for later...
See More
Unitary Transformations
12 min
Beginner
Video
Theory
This video discusses unitary matrix transformations and how they relate to the geometry of the singular value decomposition (SVD).
See More
Solving the 2D Wave Equation
73 min
Beginner
Video
Theory
In this video, we solve the 2D wave equation. We utilize two successive separation of variables to solve this partial differential equation. Topics discuss...
See More