

Filters
Type
Experience
Scope
944 items
Derivation of Rodrigues’ Rotation Formula
43 min
Intermediate
Video
Theory
In this video we explain and derive Rodrigues’ Rotation Formula. This functions describes how to rotate an arbitrary vector about another arbitrary axis of rotation. This has applications to...
See More
TikZ source Code: Sliding Mode Control Example System 2
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 2
See More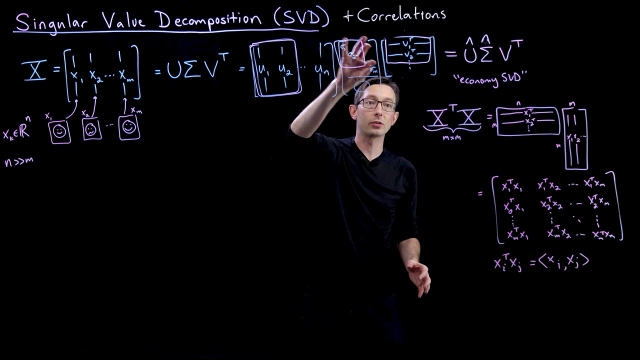
Singular Value Decomposition (SVD): Dominant Correlations
11 min
Intermediate
Video
Theory
This lectures discusses how the SVD captures dominant correlations in a matrix of data.
See More
Internal Model Control IMC Introduction
4 min
Beginner
Video
Theory
Internal Model Control IMC Introduction
See More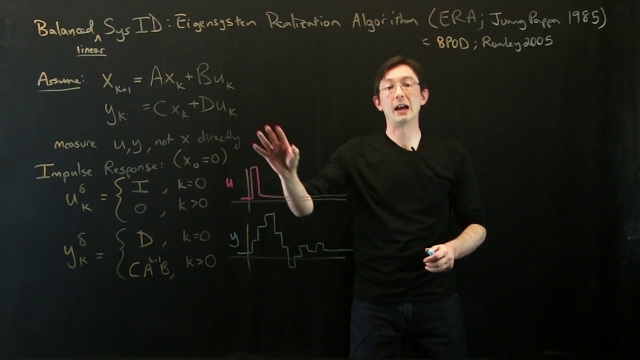
Data-Driven Control: Eigensystem Realization Algorithm
12 min
Intermediate
Video
Theory
In this lecture, we introduce the eigensystem realization algorithm (ERA), which is a purely data-driven algorithm to obtain balanced input—output models from impulse response data. ERA was...
See More![SVD: Image Compression [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_420.jpg?itok=m_mtp3IT)
SVD: Image Compression [Python]
9 min
Beginner
Video
Application
This video describes how to use the singular value decomposition (SVD) for image compression in Python.
See More
First Order Dynamics in Process Control
15 min
Beginner
Video
Theory
An overview on the identification and behavior of first order dynamics in process control.
See More
The Frobenius Norm for Matrices
2 min
Intermediate
Video
Theory
This video describes the Frobenius norm for matrices as related to the singular value decomposition (SVD).
See More
Data Preprocessing and the Short-Time Fourier Transform | Deep Learning for ...
16 min
Beginner
Video
Theory
Data in its raw form might not be ideal for training a network. There are some changes we can make to the data that are often desired or sometimes necessary in order to make training faster...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 9 - Policy Gr...
74 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More
Drone Simulation and Control, Part 2: How Do You Get a Drone to Hover?
13 min
Beginner
Video
Theory
In the last video, we showed we can manipulate the four motors of a quadcopter to maneuver it in 3D space by getting it to roll, pitch, yaw, and change its thrust. We also covered the four...
See More
Routh-Hurwitz Criterion, An Introduction
12 min
Beginner
Video
Theory
This video gives an introduction into the Routh-Hurwitz Criterion and the Routh Array. I also present a little background information in order to emphasize why the method was developed and...
See More
Control Systems Lectures - Time and Frequency Domain
10 min
Beginner
Video
Theory
This lecture introduces the time and frequency domains. A very quick description of the Laplace Transform is given which will be the base of many of classical control lectures in the future...
See More
RL Course by David Silver - Lecture 5: Model Free Control
96 min
Intermediate
Video
Theory
Dives into On Policy Monte-Carlo Control and Temporal Difference Learning, as well as Off-Policy Learning.
See More
Essence of Linear Algebra: Understand the Geomterical Beauty in Linear Algeb...
140 min
Intermediate
Course
Application
Linear Algebra is a very important and fundamental topic needed in almost every field of STEM. While the linear part of it is easy to understand and perform operations on, the geometric...
See More
Finding Roots of a Polynomial Using Matlab, Mathematica, and a TI-83
10 min
Beginner
Video
Application
In this video we show how to use Matlab and Mathematica to solve for roots of an arbitrary order polynomial. For fun, we also show how an old graphing calcu...
See More
Parseval's Theorem
5 min
Intermediate
Video
Theory
Parseval's theorem is an important result in Fourier analysis that can be used to put guarantees on the accuracy of signal approximation in the Fourier domain.
See More
Neural Networks: Caveats
8 min
Beginner
Video
Theory
This lecture discusses some key limitations of neural networks and suggests avenues of ongoing development.
See More
Resonant Frequency of a Dynamic System
29 min
Beginner
Video
Theory
In this video we discuss the resonant frequency of a dynamic system. We show how the resonant frequency, natural frequency, and damped natural frequency are...
See More
Peter Ponders PID - Closed Loop Zeros
13 min
Beginner
Video
Theory
This video covers closed loop zeros, what causes zeros and the benefits and drawbacks of closed loop zeros.
See More
Lecture 13: Stability and Routh Hurwitz criterion
31 min
Beginner
Video
Theory

Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More
Peter Ponders PID- Motor position control
16 min
Beginner
Video
Theory

Lecture 27: Lead Compensator Design using Bode plots
70 min
Beginner
Video
Theory

Frequency domain – tutorial 6: Fourier transform tables
34 min
Beginner
Video
Theory
In this video, we learn about Fourier transform tables which enable us to quickly travel from time to the frequency domain. The main learning objective is to...
See More