

Filters
Type
Experience
Scope
944 items

Final Value Theorem
33 min
Beginner
Video
Theory
In this video we discuss the Final Value Theorem. Given a signal in the Laplace domain, this allows us to predict the steady state value of the signal in th...
See More![Unitary Transformations and the SVD [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_428.jpg?itok=YznjC6fr)
Unitary Transformations and the SVD [Python]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) is related to unitary transformations, with Python code.
See More
TikZ source Code: matlab2tikz example
Beginner
Source Code
Application
TikZ source Code: matlab2tikz example
See More
Drone Simulation and Control, Part 5: Tuning the PID controller
14 min
Beginner
Video
Theory
In the last video, we learned how accurate, nonlinear models are great for simulation but they don’t lend themselves well to linear analysis and design. This video takes the nonlinear model...
See More
Heat Transfer Demonstration
63 min
Beginner
Video
Theory
In this video we demonstrate heat transfer through a metal bar. By heating one side of the bar we can impose a non-uniform temperature distribution across t...
See More
Computing the DFT Matrix
7 min
Beginner
Video
Theory
This video discusses how to compute the Discrete Fourier Transform (DFT) matrix in Matlab and Python. In practice, the DFT should usually be computed using the fast Fourier transform (FFT)...
See More
Frequency domain – tutorial 2: Fourier series
25 min
Beginner
Video
Theory
In this video, we learn Fourier series which enables us to travel from time to the frequency domain when a signal is periodic. The following materials are co...
See More
Euler Angles and the Euler Rotation Sequence
70 min
Intermediate
Video
Theory
In this video we discuss how Euler angles are used to define the relative orientation of one coordinate frame to another.
See More")
The Fast Fourier Transform (FFT)
8 min
Beginner
Video
Application
Here I introduce the Fast Fourier Transform (FFT), which is how we compute the Fourier Transform on a computer. The FFT is one of the most important algorithms of all time.
See More
Time domain - tutorial 1: what is signal processing?
1 min
Beginner
Video
Theory
In this video, we review the concept of signal processing and why it is useful to learn it. Learn Signal Processing 101 in 31 lectures covering time, frequen...
See More
Control Systems in Practice, Part 6: What Are Non-Minimum Phase Systems?
14 min
Beginner
Video
Theory
We like to categorize transfer functions into groups and label them because it helps us understand how a particular system will behave simply by knowing the group that it’s part of. We gain...
See More
Inputs and Outputs as defined by a Process Control Engineer
7 min
Beginner
Video
Theory
Defining process inputs and outputs is a lot more complicated than I initially thought when I was learning about process control. In this video, I share how ...
See More
Lecture 9: Time response and Time domain specifications
35 min
Beginner
Video
Theory
![Introduction to Deep Learning by Andrew NG [COMPLETE]](/sites/default/files/styles/search_resulkts/public/2022-01/intro_DL_0.jpg?itok=jS-vFChN)
Introduction to Deep Learning by Andrew NG [COMPLETE]
Beginner
Video
Theory
Andrew Ng's course on deep learning and neural networks.
See More
Frequency domain – tutorial 10: modulation
22 min
Beginner
Video
Theory
In this video, we learn about modulation technique which is commonly used in communication systems to send information from transmitter to receiver. The foll...
See More

TUTORIAL on Stability and Routh Hurwitz criterion
29 min
Beginner
Video
Theory

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 10 - Policy G...
81 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Humans, Robots, and Non-Prehensile Manipulation
12 min
Beginner
Video
Theory
This is a fun video that was inspired by a presentation I saw at the 2015 International Conference on Robotics and Automation (ICRA). I wanted to see if humans could duplicate the...
See More")
Koopman Spectral Analysis (Multiscale systems)
5 min
Intermediate
Video
Theory
In this video, we discuss recent applications of data-driven Koopman theory to multi-scale systems.
See More
Peter Ponders PID - Controlling an Under Damp Mass and Spring System
24 min
Beginner
Video
Theory
Demonstrates:How to calculate the PID gains. The importance of the derivative gain. How to simulate the mass and spring systemControl limitations based on s...
See More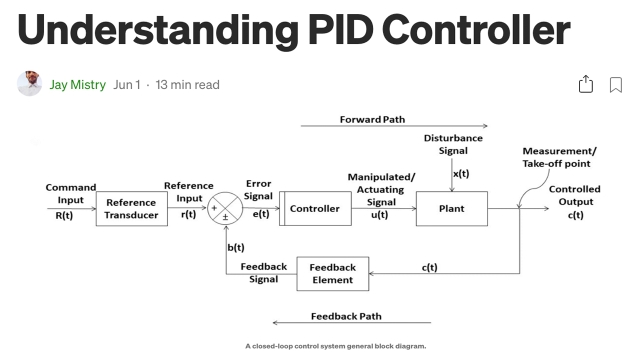
Understanding PID Controller
13 min
Beginner
Article / Blog
Theory
This blog post begins by walking through the basics and the theoretical part of the PID controllers. The controller is then tested, verified, and analyzed using MATLAB.
See More
Control Bootcamp: Sensitivity and Complementary Sensitivity
11 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance.
See More
Understanding Sensor Fusion and Tracking, Part 2: Fusing a Mag, Accel, and G...
16 min
Beginner
Video
Theory
This video describes how we can use a magnetometer, accelerometer, and a gyro to estimate an object’s orientation. The goal is to show how these sensors contribute to the solution, and to...
See More![Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_304.jpg?itok=qj48C5IZ)
Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]
10 min
Beginner
Video
Theory
This lecture explains the equivalence of controllability, reachability, and the ability to arbitrarily place eigenvalues of the closed loop system.
See More