

Filters
Type
Experience
Scope
944 items
Bode Plots by Hand: Poles and Zeros at the Origin
8 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
Designing a Lag Compensator with Bode Plot
13 min
Beginner
Video
Theory
This video walks through a phase lag compensator example using the Bode Plot method.
See More
Essence of Linear Algebra: Understand the Geomterical Beauty in Linear Algeb...
140 min
Intermediate
Course
Application
Linear Algebra is a very important and fundamental topic needed in almost every field of STEM. While the linear part of it is easy to understand and perform operations on, the geometric...
See More")
Control Bootcamp: Sensitivity and Complementary Sensitivity (Part 2)
8 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance. (Part 2)
See More")
A Nonlinear, 6 DOF Dynamic Model of an Aircraft: the Research Civil Aircraft...
103 min
Beginner
Video
Theory
In this video we develop a dynamic model of an aircraft by describing forces and moments generated by aerodynamic, propulsion, and gravity that act on the ai...
See More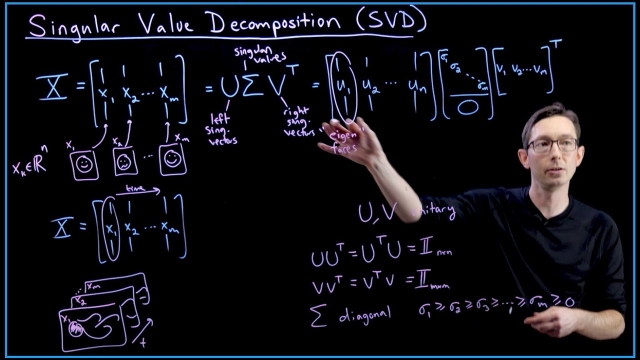
Singular Value Decomposition (SVD): Mathematical Overview
12 min
Intermediate
Video
Theory
This video presents a mathematical overview of the singular value decomposition (SVD).
See More
Posicast Control 2 - ( In English )
5 min
Beginner
Video
Theory
This video is about the Half-Cycle Posicast. It includes some hints about how to simulate this type of control using Simulink
See More
Using ‘minreal’ in Matlab to Perform Transfer Function Pole/Zero Cancellatio...
18 min
Beginner
Video
Application
In this tutorial we look at using the ‘minreal’ function in Matlab to perform pole/zero cancellation from transfer functions.Topics and time stamps:(0:10) – ...
See More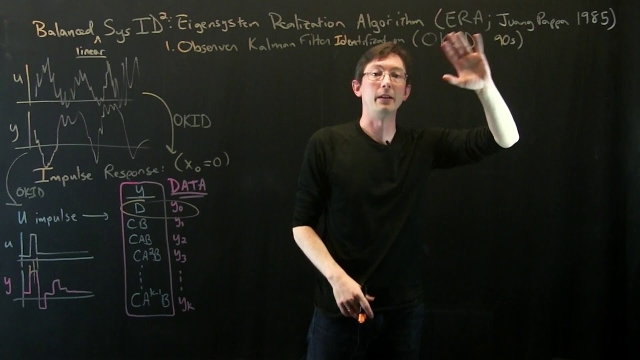
Data-Driven Control: Observer Kalman Filter Identification
12 min
Intermediate
Video
Theory
In this lecture, we introduce the observer Kalman filter identification (OKID) algorithm. OKID takes natural input--output data from a system and estimates the impulse response, for later...
See More
Unitary Transformations
12 min
Beginner
Video
Theory
This video discusses unitary matrix transformations and how they relate to the geometry of the singular value decomposition (SVD).
See More
Peter Ponders PID - LQR Optimizing Two Outputs
16 min
Beginner
Video
Theory

Practical Implementation Issues with a Full State Feedback Controller
63 min
Beginner
Video
Theory
In this video we investigate practical implementation issues that may arise when attempting to use a full state feedback controller on a real system. We ill...
See More
Drone Simulation and Control, Part 3: How to Build the Flight Code
18 min
Beginner
Video
Theory
This video describes how to create quadcopter flight software from the control architecture developed in the last video. It covers how to process the raw sensor readings and use them with...
See More![Linear Systems [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_441.jpg?itok=5LYUu0Zj "Linear Systems [Control Bootcamp]")
Linear Systems [Control Bootcamp]
24 min
Beginner
Video
Theory
Linear systems of ordinary differential equations are analyzed using eigenvalues and eigenvectors. This will be the mathematical foundation of this bootcamp on linear control theory.
See More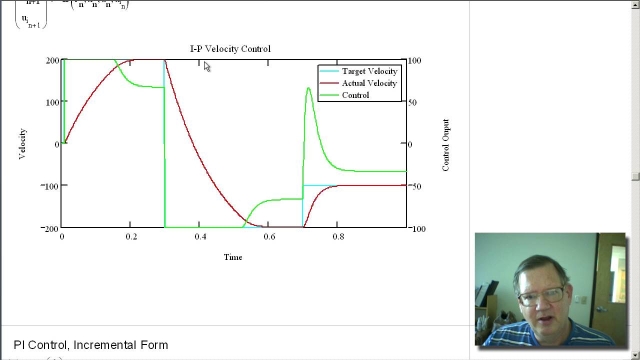
Peter Ponders PID - Controlling a non-integrating single pole system. Part 3...
9 min
Beginner
Video
Theory
Part 3 uses PI control which is the only practical means of control a non-integrating single pole system.http://deltamotion.comhttp://forum.deltamotion.com
See More
Laplace domain – tutorial 1: Laplace transform
15 min
Beginner
Video
Theory
In this video, we learn about Laplace transform which enables us to travel from time to the Laplace domain. The following materials are covered:1) why we nee...
See More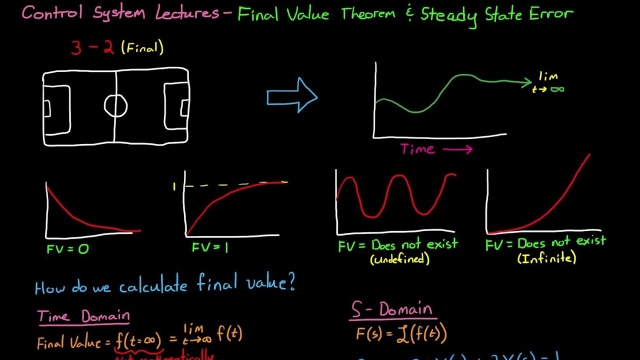
Final Value Theorem and Steady State Error
12 min
Beginner
Video
Theory
This Final Value Theorem is a way we can determine what value the time domain function approaches at infinity but from the S-domain transfer function. This is very helpful when we're trying...
See More
Types of Machine Learning 1
6 min
Beginner
Video
Theory
This lecture gives an overview of the main categories of machine learning, including supervised, un-supervised, and semi-supervised techniques, depending on the availability of expert labels...
See More
Computing Euler Angles: Tracking Attitude Using Quaternions
74 min
Intermediate
Video
Theory
In this video we continue our discussion on how to track the attitude of a body in space using quaternions. The quaternion method is similar to the Euler Kinematical Equations and Poisson...
See More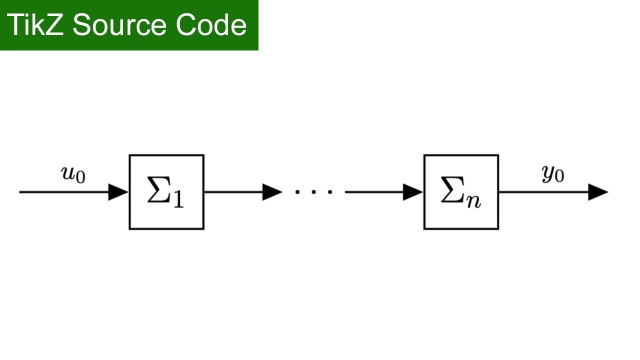
TikZ source Code: Cascade of several subsystems
Beginner
Source Code
Application
TikZ source Code: Cascade of several subsystems.
See More
An efficient orientation filter for inertial and inertial/magnetic sensor ar...
40 min
Advanced
Peer Reviewed Paper
Theory
This report presents a novel orientation filter applicable to IMUs consisting of tri-axis gyroscopes and accelerometers, and MARG sensor arrays that also include tri-axis magnetometers. The...
See More
Frequency domain – tutorial 9: frequency response
23 min
Beginner
Video
Theory
In this video, the learning objectives are to:1- fully understand the frequency response which forms the foundation of filtering 2- quickly review the common...
See More
Solving the Heat Equation with the Fourier Transform
11 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to solve the heat equation. In fact, the Fourier transform is a change of coordinates into the eigenvector coordinates for the...
See More
IIR Filters - Theory and Implementation (STM32)
20 min
Intermediate
Video
Application
Tutorial on IIR (Infinite Impulse Response) digital filters, including digital filtering overview, IIR filter theory, FIR vs IIR, Z-transform design/analysis, design using analogue...
See More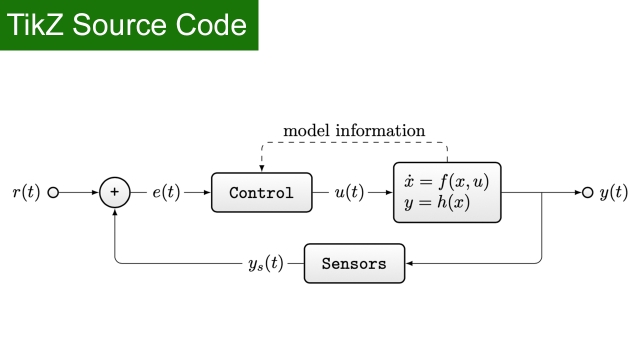
TikZ source Code: Feedback system
Beginner
Source Code
Application
TikZ source Code: Feedback system
See More