

Filters
Type
Experience
Scope
944 items

Types of Machine Learning 2
6 min
Beginner
Video
Theory
This lecture gives an overview of the main categories of machine learning, including supervised, un-supervised, and semi-supervised techniques, depending on the availability of expert labels...
See More
Vector Derivatives (the Equation of Coriolis) and the Angular Velocity Vecto...
72 min
Intermediate
Video
Theory
In this video we develop the Equation of Coriolis which describes how a vector in a rotating reference frame changes from the perspective of an observer in a non-rotating reference frame. We...
See More
Robust Principal Component Analysis (RPCA)
22 min
Intermediate
Video
Theory
Robust statistics is essential for handling data with corruption or missing entries. This robust variant of principal component analysis (PCA) is now a workhorse algorithm in several fields...
See More")
The Discrete Fourier Transform (DFT)
17 min
Beginner
Video
Application
This video introduces the Discrete Fourier Transform (DFT), which is how to numerically compute the Fourier Transform on a computer. The DFT, along with its fast FFT implementation, is one...
See More
Frequency domain – tutorial 11: equalization
11 min
Beginner
Video
Theory
In this video, we learn about equalization technique which is used in communication systems to compensate for the destructive effect of the channel between t...
See More
Process Control Introduction
14 min
Beginner
Video
Theory
An overview on state variables, inputs (manipulated and disturbance variables), outputs (measured state variables), and an example on the balance equations w...
See More
Laplace domain – tutorial 6: Transfer function & system properties
24 min
Beginner
Video
Theory
In this video, we learn about transfer function and system properties. The following materials are covered:1) what is a transfer function?2) relation between...
See More
Simple Examples of PID Control
13 min
Beginner
Video
Theory
In this video I continue the topic of PID control. We walk through a simple control system and visualize how each of the three paths, P, I, and D, all address specific problems that arise...
See More
Teaching resources for a reinforcement learning course
Intermediate
Course
Theory
Teaching resources by Dimitri P. Bertsekas for reinforcement learning courses. The website has links for freely available textbooks (for instructional purposes), videolectures, and course...
See More
IMC based PID Design for a First Order Process
8 min
Beginner
Video
Theory
IMC based PID Design for a First Order Process
See More
Lecture 3: Electrical and Mechanical System Transfer Functions
52 min
Beginner
Video
Theory
Posicast Control -3 - ( In English )
8 min
Beginner
Video
Theory
In this video a Gantry-Crane control simulation problem is introduced. The problem is presented and some introductory simulations are shown.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 16 - Monte Ca...
67 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
Working with Synthetic Data | Deep Learning for Engineers, Part 2
18 min
Beginner
Video
Theory
This video covers the first step in deep learning: having access to data. Part of making the decision of whether deep learning is right for your project comes down to the type and amount of...
See More
Lecture 7: More on Signal Flow Graphs and Block Diagram Reduction
44 min
Beginner
Video
Theory
Peter Ponders PID - IAE,ITAE,ISE Performance indicators
17 min
Beginner
Video
Theory
Performance indicators can be used to compute closed loop pole locations. Only one gain parameter is required to move the pole locations closer to the origi...
See More
Smart Projectile State Estimation Using Evidence Theory
Intermediate
Peer Reviewed Paper
Theory
This journal article provides a very good practical understanding of Dempster-Shafer theory using sensor fusion and state estimation as the backdrop.
See More
Sketching Root Locus Part 2
16 min
Beginner
Video
Theory
This is the second part of how to sketch a root locus by hand. However instead of following the normal rules for sketching a locus that you'd see in a book, I decided to explain the rules...
See More
Drone Control and the Complementary Filter
11 min
Beginner
Video
Theory
Let's talk about the complementary filter and how we can use it to estimate the attitude of a drone using an IMU. It is such a dead simple filter, which is a good reason to learn it, but it...
See More
Numerically Calculating Partial Derivatives
59 min
Beginner
Video
Theory
In this video we discuss how to calculate partial derivatives of a function using numerical techniques. In other words, these partials are calculated withou...
See More![Cayley-Hamilton Theorem [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_395.jpg?itok=Xi08rPqq "Cayley-Hamilton Theorem [Control Bootcamp]")
Cayley-Hamilton Theorem [Control Bootcamp]
6 min
Beginner
Video
Theory
Here we describe the Cayley-Hamilton Theorem, which states that every square matrix satisfies its own characteristic equation. This is very useful to prove results related to...
See More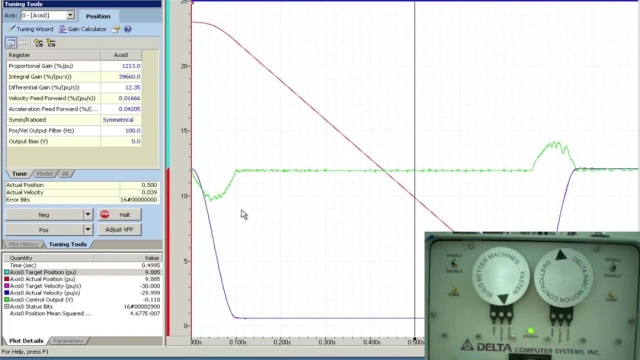
Auto Tuning a Small DC Motor in Torque Mode
1 min
Beginner
Video
Theory
I was really testing the picture in picture feature of the Screen Flow software I use to make these videos. I knew the auto tuning would work. I kept the v...
See More
Data-Driven Control: Balanced Proper Orthogonal Decomposition
27 min
Intermediate
Video
Theory
In this lecture, we introduce the balancing proper orthogonal decomposition (BPOD) to approximate balanced truncation for high-dimensional systems.
See More
The Inverse Laplace Transform
48 min
Beginner
Video
Theory
In this video we show how to perform the inverse Laplace transform on a signal in the Laplace domain to obtain its equivalent representation in the time doma...
See More![SVD: Eigen Action Heros [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_411.jpg?itok=YrhhkBXx)
SVD: Eigen Action Heros [Matlab]
16 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces. In this example, we represent action heros (Matlab).
See More