

Filters
Type
Experience
Scope
944 items
")
Laplace domain – tutorial 2: Region of Convergence (ROC)
8 min
Beginner
Video
Theory
In this video, we learn five golden rules on how to quickly find the Region of Convergence (ROC) of Laplace transform. Learn Signal Processing 101 in 31 lect...
See More
Machine Learning - Andrew Ng, Stanford University
Beginner
Video
Theory
Machine learning is the science of getting computers to act without being explicitly programmed. In the past decade, machine learning has given us self-driving cars, practical speech...
See More
Solving the Heat Equation with the Fourier Transform
11 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to solve the heat equation. In fact, the Fourier transform is a change of coordinates into the eigenvector coordinates for the...
See More
Project Based Engineering Instrumentation with CircuitPython
Beginner
Book
Application
This textbook has been designed with the student and faculty member in mind. First, this textbook goes hand in hand with Engineering Instrumentation taught at the undergraduate level at many...
See More
Laplace domain – tutorial 3: Laplace transform tables
17 min
Beginner
Video
Theory
In this video, we cover Laplace transform tables which help us to quickly find Laplace and inverse Laplace transforms. The main learning objective is to full...
See More
Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More
Fuzzy Logic, Part 3: Design and Applications of a Fuzzy Logic Controller
17 min
Beginner
Video
Theory
This video walks you through the process of designing a fuzzy inference system that can balance a pole on a cart. You can design a fuzzy logic controller using just experience and intuition...
See More
PID Control with Posicast 7 - ( In English )
12 min
Beginner
Video
Theory
In this video closed-loop configurations with PID controllers and Posicast are introduced.
See More
Lecture 29: State space representation
29 min
Beginner
Video
Theory

Cascade Control Intro
8 min
Beginner
Video
Theory
How can we improve the disturbance rejection of our controllers using additional, relevant measurements? Tune in to find out!
See More
Building a Matlab/Simulink Model of an Aircraft: the Research Civil Aircraf...
51 min
Intermediate
Video
Theory
In this video we implement the RCAM model as a Matlab script that is called from a Simulink model. The result is a fully encapsulated Simulink model of a nonlinear, 6 DOF aircraft. Please...
See More
Peter Ponders PID - Cascade Control Part2
14 min
Beginner
Video
Theory
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer loop poles are still pla...
See More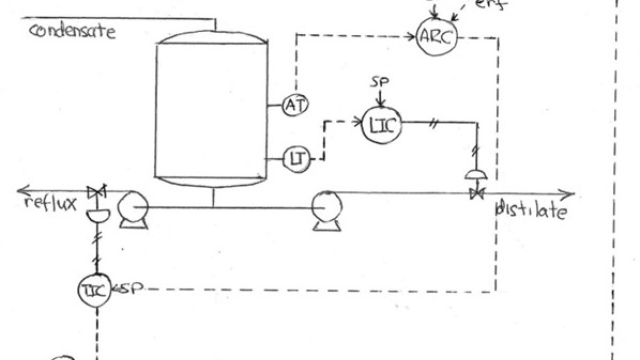

Lecture 19: Lead and PD compensator Design using Root Locus
54 min
Beginner
Video
Theory

Understanding PID Control, Part 3: Expanding Beyond a Simple Derivative
11 min
Beginner
Video
Theory
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models. Noise is generated by sensors and is present in...
See More
Dynamic Modeling in Process Control
14 min
Beginner
Video
Theory
I'll show you how we can build the dynamic models necessary to derive process transfer functions as an introduction to process control.
See More
How the Flight Controller Code Works - dRehmFlight VTOL
20 min
Intermediate
Video
Application
This video will walk you through the flight controller code of dRehmFlight VTOL to give you a better understanding of the contents and structure. The hope is that it will cover almost...
See More with Smith Predictor")
SOPDT Sliding Mode Control ( SMC ) with Smith Predictor
6 min
Beginner
Video
Theory

Lecture 14: Routh Hurwitz Criterion
22 min
Beginner
Video
Theory
")
How to Land on a Planet (and how it'll be done in the future!)
15 min
Beginner
Video
Theory
This video covers the basic ideas behind how engineers develop the algorithms that allow autonomous robots to land on other planetary bodies.
See More
Deploying Deep Learning Models | Deep Learning for Engineers, Part 5
15 min
Beginner
Video
Theory
This video covers the additional work and considerations you need to think about once you have a deep neural network that can classify your data. We need to consider that the trained network...
See More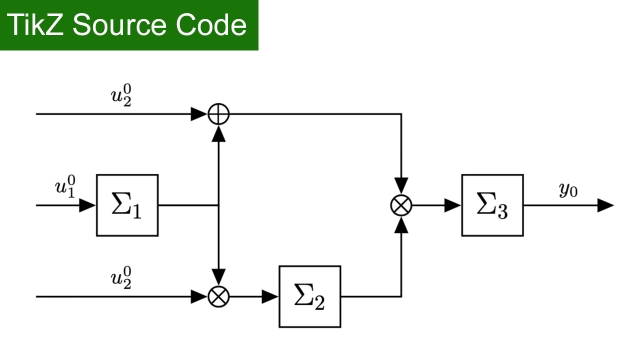
TikZ source Code: Multiplication of system variables
Beginner
Source Code
Application
TikZ source Code: Multiplication of system variables
See More![Controllability and the Discrete-Time Impulse Response [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_302.jpg?itok=xjXmM9_U)
Controllability and the Discrete-Time Impulse Response [Control Bootcamp]
5 min
Beginner
Video
Theory
This lecture derives the impulse response for a discrete-time system and relates this to the controllability matrix.
See More
Matrix Completion and the Netflix Prize
6 min
Beginner
Video
Theory
This video describes how the singular value decomposition (SVD) can be used for matrix completion and recommender systems.
See More
Routh-Hurwitz Criterion, Special Cases
13 min
Beginner
Video
Theory
This video presents two special cases that you can encounter when filling out the Routh Array. The first case is when there is a zero in a row with at least one non-zero element following...
See More