

Filters
Type
Experience
Scope
944 items
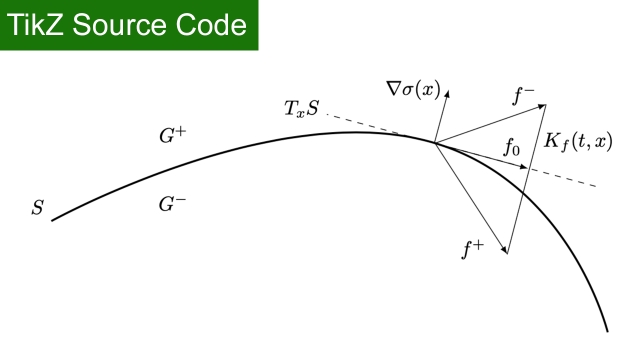
TikZ source Code: Switching Smooth Filippov
Beginner
Source Code
Application
TikZ source Code: Switching Smooth Filippov
See More
Understanding Model Predictive Control, Part 6: How to Design an MPC Control...
9 min
Beginner
Video
Theory
Learn how to design an MPC controller for an autonomous vehicle steering system using Model Predictive Control Toolbox™. This video walks you through the design process of an MPC controller...
See More
Standard HW Problem #2: Which is the real open loop transfer function?
13 min
Beginner
Video
Theory
In this video, we’ll go through another standard homework problem so you can see how you can apply many of the things you’re learning into a single problem. The question is, we have two...
See More
Introduction to Bode Plots
42 min
Beginner
Video
Theory
In this video we introduce the concept of Bode plots including what they represent, how they are generated, as well as how to use Matlab tools to work with B...
See More
Derivation and Solution of Laplace’s Equation
33 min
Beginner
Video
Theory
In this video we show how the heat equation can be simplified to obtain Laplace’s equation. We investigate how to solve Laplace’s equation using separation ...
See More
Control Systems with MATLAB - Root Locus
31 min
Beginner
Video
Theory

Laplace domain – tutorial 5: Inverse Laplace transform
24 min
Beginner
Video
Theory
In this video, we cover inverse Laplace transform which enables us to travel back from Laplace to the time domain. We will learn how to use simple tricks alo...
See More
A Nonlinear, 6 DOF Dynamic Model of an Aircraft: the Research Civil Aircraft...
104 min
Intermediate
Video
Theory
In this video we develop a dynamic model of an aircraft by describing forces and moments generated by aerodynamic, propulsion, and gravity that act on the aircraft. This video outlines the...
See More
Control Systems with MATLAB - Modelling
27 min
Beginner
Video
Theory
![Introduction to Deep Learning by Andrew NG [COMPLETE]](/sites/default/files/styles/search_resulkts/public/2022-01/intro_DL_0.jpg?itok=jS-vFChN)
Introduction to Deep Learning by Andrew NG [COMPLETE]
Beginner
Video
Theory
Andrew Ng's course on deep learning and neural networks.
See More")
Frequency domain – tutorial 3: filtering (periodic signals)
13 min
Beginner
Video
Theory
In this video, we learn about filtering which enables us to manipulate the frequency content of a signal. A common filtering application is to preserve desi...
See More
Bode Plots by Hand: Complex Poles or Zeros
11 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
Mounting and Configuring the IMU - dRehmFlight VTOL
4 min
Beginner
Video
Application
This video will show you how to verify proper operation of the IMU for dRehmFlight VTOL before your first flight. It will also show you how to correctly mount the IMU to your aircraft. The...
See More
The Laplace Transform - A Graphical Approach
13 min
Beginner
Video
Theory
A lot of books cover how to perform a Laplace Transform to solve differential equations. This video tries to show graphically what the Laplace Transform is doing and why figuring out the...
See More
Relative Gain Array RGA Analysis
6 min
Beginner
Video
Theory
I cover how you can find the relative gain array from the steady state gain array, and interpret the results to determine which input to pair with which outp...
See More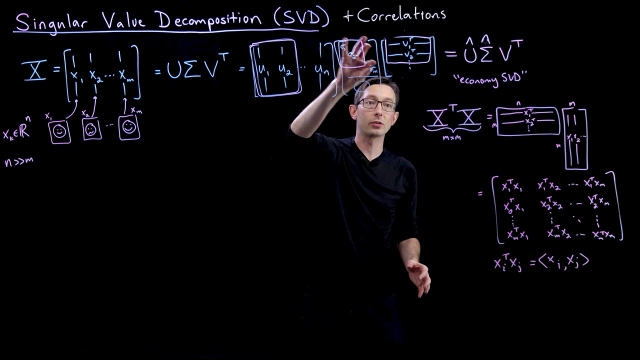
Singular Value Decomposition (SVD): Dominant Correlations
11 min
Intermediate
Video
Theory
This lectures discusses how the SVD captures dominant correlations in a matrix of data.
See More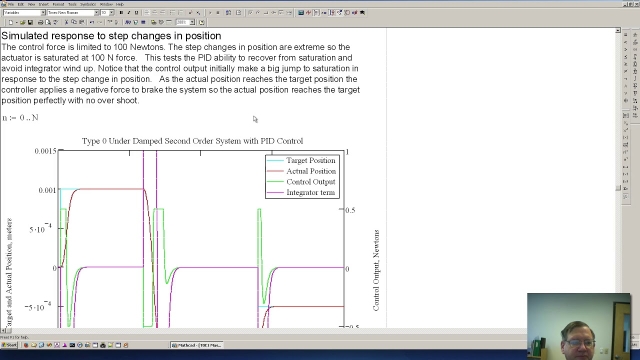
Peter Ponders PID - Controlling an Under Damp Mass and Spring System
24 min
Beginner
Video
Theory
Demonstrates:How to calculate the PID gains. The importance of the derivative gain. How to simulate the mass and spring systemControl limitations based on s...
See More
Standard HW Problem #1: PID and Root Locus
18 min
Beginner
Video
Theory
A walk through of a typical homework problem using the root locus method to tune a PID controller. This is the first in what may be a series of homework style problems I'll cover. This is...
See More
State Space in Process Control
10 min
Beginner
Video
Theory
An overview on how we can derive a state space model from a given set of state variables and inputs, as well as an intro to deviation variables. This is part...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 3 - Model-Fr...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
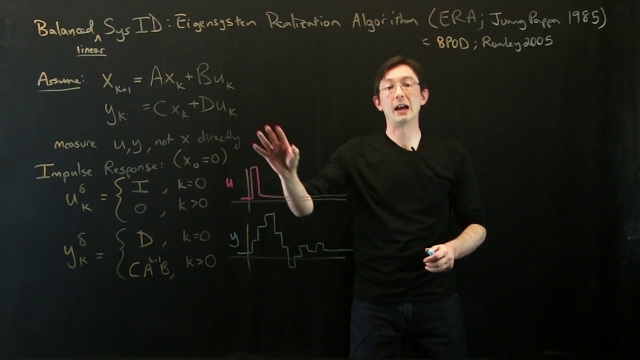
Data-Driven Control: Eigensystem Realization Algorithm
12 min
Intermediate
Video
Theory
In this lecture, we introduce the eigensystem realization algorithm (ERA), which is a purely data-driven algorithm to obtain balanced input—output models from impulse response data. ERA was...
See More![SVD: Image Compression [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_420.jpg?itok=m_mtp3IT)
SVD: Image Compression [Python]
9 min
Beginner
Video
Application
This video describes how to use the singular value decomposition (SVD) for image compression in Python.
See More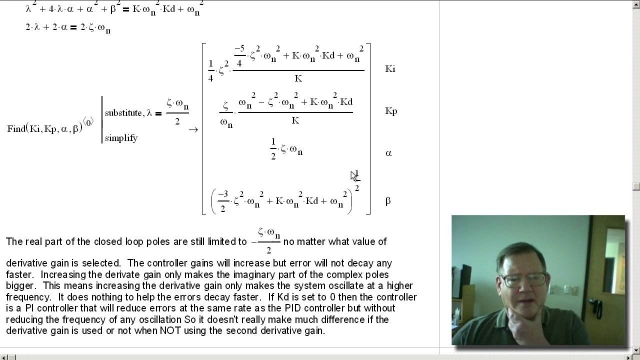
Peter Ponders PID - Why PID with 2nd Derivative Gain?
27 min
Beginner
Video
Theory
If you have ever tuned a hydraulic system and wondered why PID control didn't work better than PI control the answer is here. Since the 1980s people have kn...
See More
Controls Engineering in the FIRST Robotics Competition
Intermediate
Book
Application
This guide is intended to make an advanced engineering topic approachable so it can be applied by those who aren’t experts in control theory. The intended audience is high school students...
See More
RL Course by David Silver - Lecture 4: Model-Free Prediction
97 min
Intermediate
Video
Theory
An introduction to Monte-Carlo Learning and Temporal Difference Learning
See More