

Filters
Type
Experience
Scope
944 items
![Denoising Data with FFT [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_358.jpg?itok=BSMOuW9N "Denoising Data with FFT [Matlab]")
Denoising Data with FFT [Matlab]
10 min
Beginner
Video
Application
This video describes how to clean data with the Fast Fourier Transform (FFT) in Matlab.
See More
Frequency domain – tutorial 6: Fourier transform tables
34 min
Beginner
Video
Theory
In this video, we learn about Fourier transform tables which enable us to quickly travel from time to the frequency domain. The main learning objective is to...
See More
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Intermediate
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transformation matrix which combines a...
See More
The Fast Fourier Transform Algorithm
10 min
Beginner
Video
Theory
Here I discuss the Fast Fourier Transform (FFT) algorithm, one of the most important algorithms of all time.
See More
dRehmFlight VTOL - Teensy (Arduino) Flight Controller and Stabilization
5 min
Beginner
Video
Application
dRehmFlight VTOL is a new flight controller and stabilization package intended to be used for small to medium sized hobby or research projects. dRehmFlight is the code, and the physical...
See More")
Course Introduction (Signal Processing 101)
2 min
Beginner
Video
Theory
Learn Signal Processing 101 in 31 lectures covering time, frequency and Laplace domain in about 8 hours all together:https://www.youtube.com/watch?v=KZd68xga...
See More
TikZ source Code: A single MIMO system
Beginner
Source Code
Application
TikZ source Code: A single MIMO system
See More
Lecture 12: Steady state error
26 min
Beginner
Video
Theory

Finding Transfer Functions from Response Graphs
9 min
Beginner
Video
Theory
Given a system response to a unit step change, in this video I'll cover how we can derive the transfer function so we can predict how our system will respond...
See More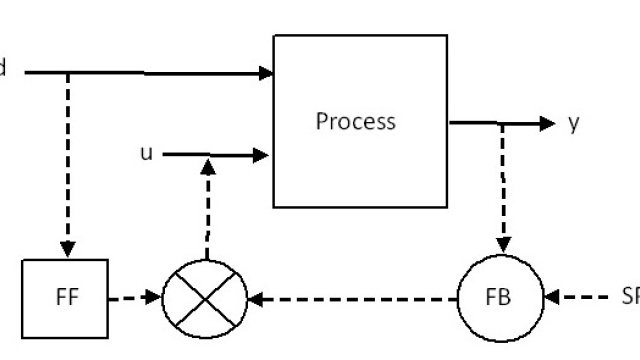
Feedforward Control
15 min
Intermediate
Article / Blog
Application
When and how to use feedforward control
See More
Frequency domain – tutorial 4: Gibbs phenomenon
4 min
Beginner
Video
Theory
In this video, we quickly review the Gibbs phenomenon which involves two facts:1) Fourier sums overshoot at a jump discontinuity2) overshoot does not disapp...
See More
Lecture 17: Introduction to Compensators/Controllers
35 min
Beginner
Video
Theory

Bode Plot Gain and Phase Margin Determination
5 min
Beginner
Video
Theory
I'll show you how we can determine the Gain and Phase Margin from a Bode Plot (at some fixed controller gain).
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 7 - Imitation...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More![Stability and Eigenvalues [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_289.jpg?itok=dbD4O7ru)
Stability and Eigenvalues [Control Bootcamp]
19 min
Beginner
Video
Theory
Here we discuss the stability of a linear system (in continuous-time or discrete-time) in terms of eigenvalues. Later, we will actively modify these eigenvalues, and hence the dynamics...
See More")
Koopman Spectral Analysis (Representations)
16 min
Intermediate
Video
Theory
In this video, we explore how to obtain finite-dimensional representations of the Koopman operator from data, using regression.
See More
Transfer Function to State Space
56 min
Beginner
Video
Theory
In this video we show how to transform a transfer function to an equivalent state space representation. We will derive various transformations such as contr...
See More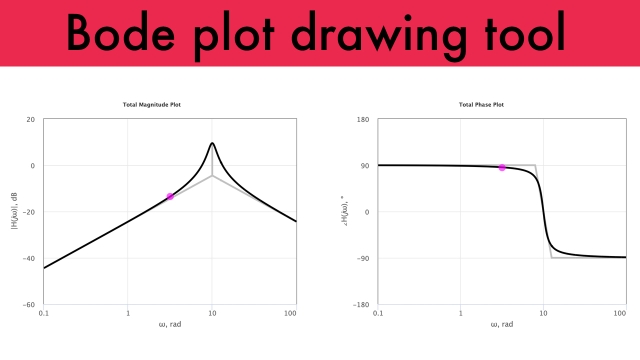
Bode Plot Drawing Tool
Intermediate
Article / Blog
Demonstration
This page demonstrates the techniques described previously to take a transfer function defined by the user, identify the constituent terms, draw the individual Bode plots, and then combine...
See More
Overview of Dempster-Shafer Theory (Evidence Theory)
Beginner
Article / Blog
Theory
This is an overview of Dempster-Shafer Theory (Evidence Theory) that provides an introduction, definition, basic information about combination rules, some issues with the theory, and the...
See More![Degrees of Controllability and Gramians [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_305.jpg?itok=6ZkiWCDa)
Degrees of Controllability and Gramians [Control Bootcamp]
15 min
Beginner
Video
Theory
This lecture discusses degrees of controllability using the controllability Gramian and the singular value decomposition of the controllability matrix.
See More
Control Bootcamp: Sensitivity and Robustness
9 min
Beginner
Video
Theory
Here we show that peaks in the sensitivity function result in a lack of robustness.
See More![Randomized SVD Code [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_402.jpg?itok=pmR7mX3g)
Randomized SVD Code [Python]
10 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Python code).
See More
Manipulating Aerodynamic Coefficients
25 min
Beginner
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as ...
See More
Machine Learning - Andrew Ng, Stanford University
Beginner
Video
Theory
Machine learning is the science of getting computers to act without being explicitly programmed. In the past decade, machine learning has given us self-driving cars, practical speech...
See More
Data-Driven Control: Change of Variables in Control Systems
14 min
Intermediate
Video
Theory
In this lecture, we discuss how linear control systems transform under a change of coordinates in the state variable. This will be useful to derive balancing transformations that identify...
See More