

Filters
Type
Experience
Scope
944 items
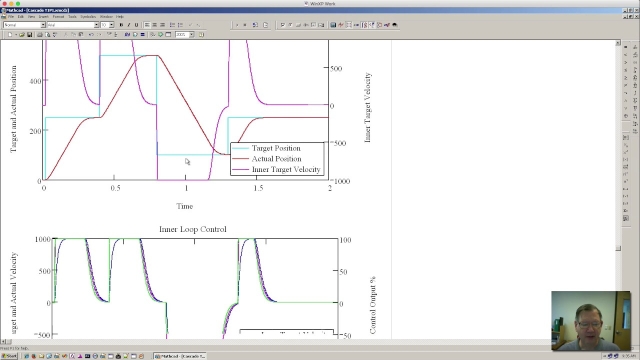
Peter Ponders PID - Cascade Control Part2
14 min
Beginner
Video
Theory
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer loop poles are still pla...
See More
Lecture 11: Transient Response and Numerical Problems
30 min
Beginner
Video
Theory
 with Smith Predictor")
SOPDT Sliding Mode Control ( SMC ) with Smith Predictor
6 min
Beginner
Video
Theory

Laplace Transforms to Derive Transfer Functions
14 min
Beginner
Video
Theory
Once we have a state space model, we will take a Laplace Transform to derive the transfer function to determine the response of an output relative to an inpu...
See More
Lecture 21: Introduction to Frequency Response
57 min
Beginner
Video
Theory
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 5 - Value Fun...
82 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More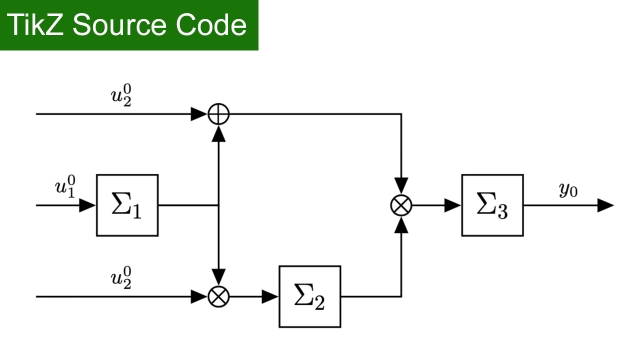
TikZ source Code: Multiplication of system variables
Beginner
Source Code
Application
TikZ source Code: Multiplication of system variables
See More
Direct Synthesis for PID Controller Design
12 min
Beginner
Video
Theory
What tuning parameters should you choose for your controller? The Direct Synthesis Model is one method control engineers use today to evaluate controller par...
See More
Lecture 23: Bode plots
48 min
Beginner
Video
Theory

RL Course by David Silver - Lecture 3: Planning by Dynamic Programming
99 min
Intermediate
Video
Theory
Introduces policy evaluation and iteration, value iteration, extensions to dynamic programming and contraction mapping.
See More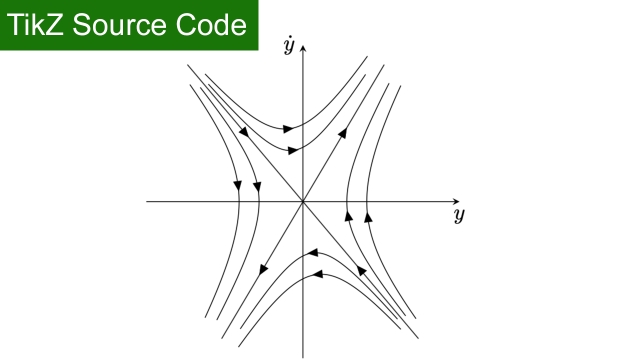
TikZ source Code: Sliding Mode Control Example System 1
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 1
See More
State Space to Transfer Function
48 min
Beginner
Video
Theory
In this video we show how to transform a linear state space representation of a dynamic system to an equivalent transfer function representation. We will de...
See More
Bode Plots by Hand: Real Poles or Zeros
13 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
Designing a Lead Compensator with Bode Plot
14 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Bode Plot method.
See More
Understanding The Sensitivity Function
13 min
Beginner
Video
Theory
In this video I explain the sensitivity function and try to demystify the equation used to solve for the nominal sensitivity peak. Sensitivity describes how much process variations affect...
See More
What Is a Control System and Why Should I Care? (Part 2)
34 min
Beginner
Video
Theory
This talk gives a glimpse of some of the methods and math that allow us to understand feedback systems. Continuing on from Part 1, it gives a description of how we use scientific principles...
See More
Using a Homogeneous Transformation Matrix to Combine Rotation and Translatio...
63 min
Beginner
Video
Theory
In this video we discuss how to properly deal with coordinate frames that are both rotated and translated from one another. We develop a homogeneous transfo...
See More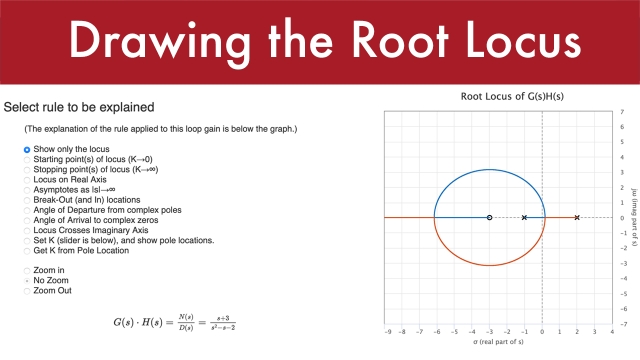
Drawing the root locus (Interactive Tool)
Beginner
App
Theory
This page was developed to help student learn how to sketch the root locus by hand. You can enter a numerator and denominator for G(s)H(s) (i.e., the loop gain) and the program will guide...
See More
Designing a PID Controller Using the Ziegler-Nichols Method
33 min
Beginner
Video
Theory
In this video we discuss how to use the Ziegler-Nichols method to choose PID controller gains. In addition to discussing the method and providing a Matlab i...
See More
Data-Driven Control: ERA/OKID Example in Matlab
8 min
Intermediate
Video
Application
In this lecture, we explore the observer Kalman filter identification (OKID) and eigensystem realization algorithm (ERA) in Matlab on an example.
See More![SVD: Optimal Truncation [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_423.jpg?itok=Op0DbiId)
SVD: Optimal Truncation [Matlab]
12 min
Intermediate
Video
Application
This video describes how to optimally truncate the singular value decomposition (SVD) for noisy data (Matlab code).
See More
Transfer Functions: Introduction and Implementation
53 min
Beginner
Video
Theory
In this video we introduce transfer functions and show how they can be derived from a set of linear, ordinary differential equations. We also examine how to...
See More
Discrete-Time Dynamical Systems
9 min
Intermediate
Video
Theory
This video shows how discrete-time dynamical systems may be induced from continuous-time systems.
See More
Control Bootcamp: Three Equivalent Representations of Linear Systems
12 min
Beginner
Video
Theory
This video explores three equivalent representations of linear systems: State-space ODEs, Frequency domain transfer functions, and Time-domain impulse response convolution.
See More
Fuzzy Logic, Part 3: Design and Applications of a Fuzzy Logic Controller
17 min
Beginner
Video
Theory
This video walks you through the process of designing a fuzzy inference system that can balance a pole on a cart. You can design a fuzzy logic controller using just experience and intuition...
See More