

Filters
Type
Experience
Scope
944 items

Understanding Sensor Fusion and Tracking, Part 5: How to Track Multiple Obje...
15 min
Beginner
Video
Theory
This video describes two common problems that arise when tracking multiple objects: data association and track maintenance. We cover a few ways to solve these issues and provide a general...
See More
Numerically Solving Partial Differential Equations
101 min
Beginner
Video
Theory
In this video we show how to numerically solve partial differential equations by numerically approximating partial derivatives using the finite difference me...
See More
Data-Driven Control: Balanced Truncation
14 min
Intermediate
Video
Theory
In this lecture, we describe the balanced truncation procedure for model reduction, where a handful of the most controllable and observable state directions are kept for the reduced-order...
See More![SVD: Eigenfaces 1 [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_412.jpg?itok=X4iw3jz2)
SVD: Eigenfaces 1 [Matlab]
7 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Matlab code, part 1).
See More
Posicast Control 4 - ( In English )
12 min
Beginner
Video
Theory
This video continues to explore the gantry crame control simulations in open-loop- The main focus is the half-cycle Posicast.
See More
Using ‘rlocus’ in Matlab to Plot the Root Locus
19 min
Beginner
Video
Application
This tutorial illustrates how to use the ‘rlocus’ command in Matlab to quickly and easily sketch the root locus.Discussion on the 3 example transfer function...
See More
Data-Driven Control: The Goal of Balanced Model Reduction
15 min
Intermediate
Video
Theory
In this lecture, we discuss the overarching goal of balanced model reduction: Identifying key states that are most jointly controllable and observable, to capture the most input—output...
See More![Unitary Transformations and the SVD [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_428.jpg?itok=YznjC6fr)
Unitary Transformations and the SVD [Python]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) is related to unitary transformations, with Python code.
See More
Peter Ponders PID - InputShaping
21 min
Beginner
Video
Theory

Relationship Between Poles and Performance of a Dynamic System
43 min
Beginner
Video
Theory
In this video we establish the relationship between pole locations and associated performance of a dynamic system. This relationship is useful to translate ...
See More
Drone Simulation and Control, Part 5: Tuning the PID controller
14 min
Beginner
Video
Theory
In the last video, we learned how accurate, nonlinear models are great for simulation but they don’t lend themselves well to linear analysis and design. This video takes the nonlinear model...
See More
Peter Ponders PID - Root Locus Is Useless
25 min
Beginner
Video
Theory

Time domain - tutorial 7: system properties
22 min
Beginner
Video
Theory
In this video, we cover system properties. The concept of memoryless, causal, stable, invertible, time-invariant and linear systems is intuitively explained...
See More
Computing the DFT Matrix
7 min
Beginner
Video
Theory
This video discusses how to compute the Discrete Fourier Transform (DFT) matrix in Matlab and Python. In practice, the DFT should usually be computed using the fast Fourier transform (FFT)...
See More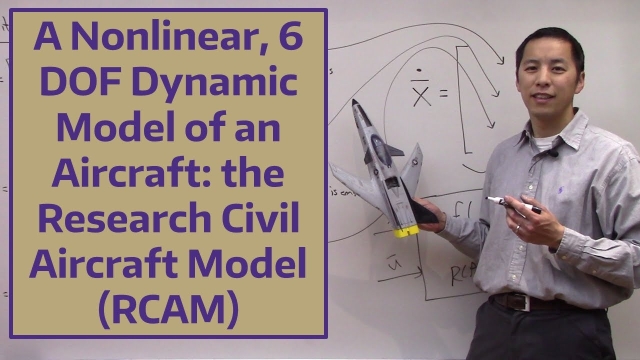
A Nonlinear, 6 DOF Dynamic Model of an Aircraft: the Research Civil Aircraft...
104 min
Intermediate
Video
Theory
In this video we develop a dynamic model of an aircraft by describing forces and moments generated by aerodynamic, propulsion, and gravity that act on the aircraft. This video outlines the...
See More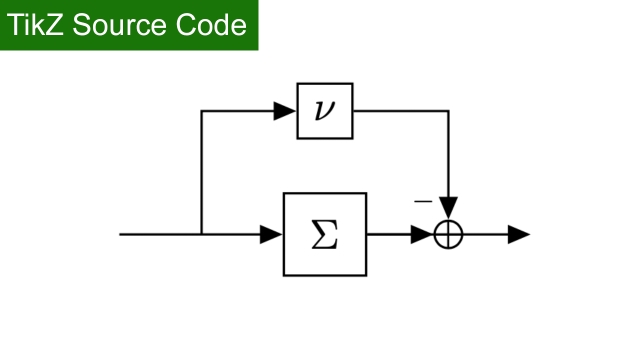
TikZ source Code: Feedforward passivity index
Beginner
Source Code
Application
TikZ source Code: Feedforward passivity index
See More
Time domain - tutorial 10: interconnection of LTI systems
7 min
Beginner
Video
Theory
In this video, we learn how to connect LTI systems to make a bigger system. The learning objectives are to:1) get familiar with parallel and series intercon...
See More")
The Fast Fourier Transform (FFT)
8 min
Beginner
Video
Application
Here I introduce the Fast Fourier Transform (FFT), which is how we compute the Fourier Transform on a computer. The FFT is one of the most important algorithms of all time.
See More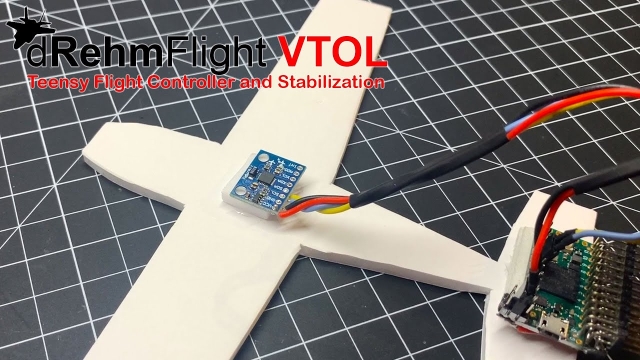
Mounting and Configuring the IMU - dRehmFlight VTOL
4 min
Beginner
Video
Application
This video will show you how to verify proper operation of the IMU for dRehmFlight VTOL before your first flight. It will also show you how to correctly mount the IMU to your aircraft. The...
See More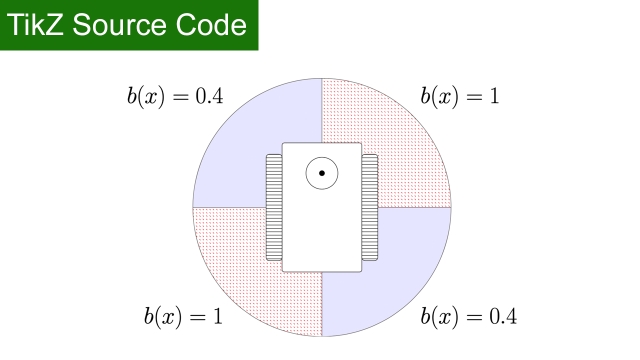
TikZ source Code: Mobile Robot Slip
Beginner
Source Code
Application
TikZ source Code: Mobile Robot Slip
See More
Feedback Control and Block Diagram Introduction
10 min
Beginner
Video
Theory
How do engineers begin to design controllers to respond to disturbances and maintain set points? In this example, I'll discuss how we can design a controller...
See More
Lecture 9: Time response and Time domain specifications
35 min
Beginner
Video
Theory

Internal Model Control IMC Introduction
4 min
Beginner
Video
Theory
Internal Model Control IMC Introduction
See More
TUTORIAL on Stability and Routh Hurwitz criterion
29 min
Beginner
Video
Theory

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 3 - Model-Fr...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group