

Filters
Type
Experience
Scope
944 items

Understanding Sensor Fusion and Tracking, Part 5: How to Track Multiple Obje...
15 min
Beginner
Video
Theory
This video describes two common problems that arise when tracking multiple objects: data association and track maintenance. We cover a few ways to solve these issues and provide a general...
See More
Numerically Solving Partial Differential Equations
101 min
Beginner
Video
Theory
In this video we show how to numerically solve partial differential equations by numerically approximating partial derivatives using the finite difference me...
See More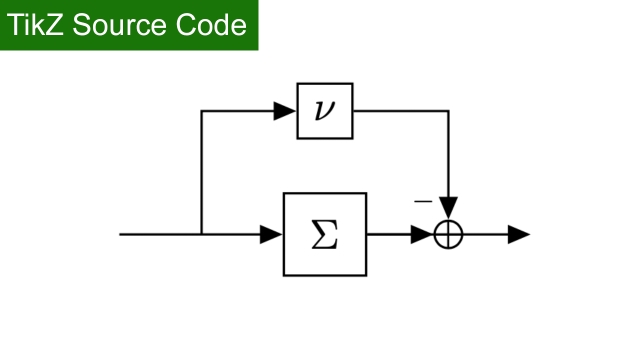
TikZ source Code: Feedforward passivity index
Beginner
Source Code
Application
TikZ source Code: Feedforward passivity index
See More
Control Systems with MATLAB - Root Locus
31 min
Beginner
Video
Theory

Using ‘rlocus’ in Matlab to Plot the Root Locus
19 min
Beginner
Video
Application
This tutorial illustrates how to use the ‘rlocus’ command in Matlab to quickly and easily sketch the root locus.Discussion on the 3 example transfer function...
See More
Resonant Frequency of a Dynamic System
29 min
Beginner
Video
Theory
In this video we discuss the resonant frequency of a dynamic system. We show how the resonant frequency, natural frequency, and damped natural frequency are...
See More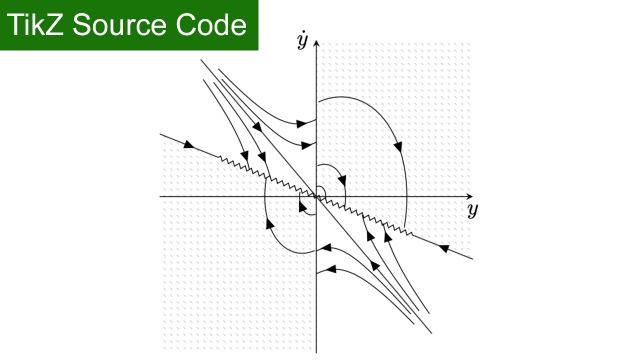
TikZ source Code: Sliding Mode Control Example
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example
See More
Lecture 32: Linearisation and State Space Fundamentals
96 min
Beginner
Video
Theory

Solving the 1D Heat Equation
47 min
Beginner
Video
Theory
In this video we simplify the general heat equation to look at only a single spatial variable, thereby obtaining the 1D heat equation. We solving the result...
See More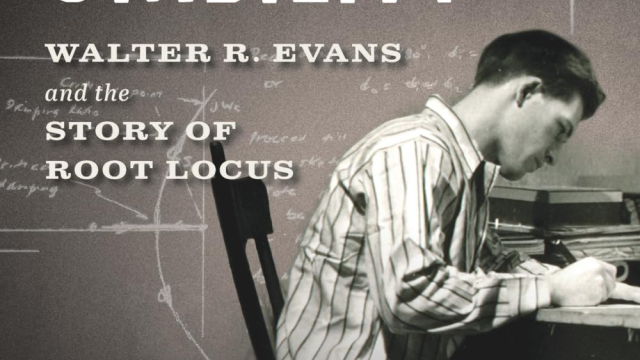
Into Stability: Walter R Evans and the Story of Root Locus
Beginner
Book
Theory
In the aftermath of World War II, engineers faced challenges their slide rules couldn’t solve. Walter R. Evans wasn’t looking to change the world—he just wanted to help engineers see clearly...
See More
Frequency domain – tutorial 6: Fourier transform tables
34 min
Beginner
Video
Theory
In this video, we learn about Fourier transform tables which enable us to quickly travel from time to the frequency domain. The main learning objective is to...
See More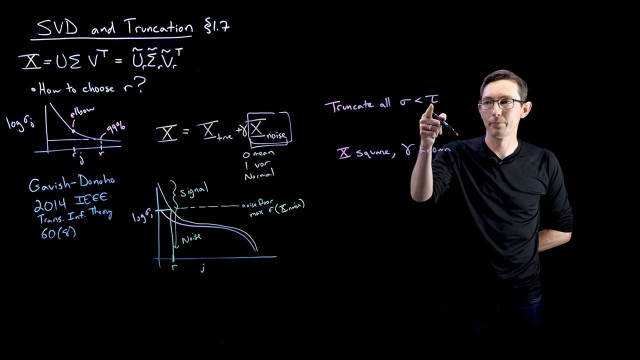
SVD and Optimal Truncation
11 min
Intermediate
Video
Theory
This video describes how to truncate the singular value decomposition (SVD) for matrix approximation.
See More
Manipulating Aerodynamic Coefficients
25 min
Intermediate
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as CL and CD.
See More")
Course Introduction (Signal Processing 101)
2 min
Beginner
Video
Theory
Learn Signal Processing 101 in 31 lectures covering time, frequency and Laplace domain in about 8 hours all together:https://www.youtube.com/watch?v=KZd68xga...
See More
Using Antenna Toolbox with Phased Array Systems
Intermediate
Example
Theory
When you create antenna arrays such as a uniform linear array (ULA), you can use antennas that are built into Phased Array System Toolbox™. Alternatively, you can use Antenna Toolbox™...
See More
The Frobenius Norm for Matrices
2 min
Intermediate
Video
Theory
This video describes the Frobenius norm for matrices as related to the singular value decomposition (SVD).
See More
Setting Up Your Radio Connection - dRehmFlight VTOL
4 min
Beginner
Video
Application
This video will show you how to set up your radio to work with dRehmFlight VTOL. The code supports PWM, PPM, and SBUS type receivers, allowing you to connect and use 6 channels within the...
See More
Finding Transfer Functions from Response Graphs
9 min
Beginner
Video
Theory
Given a system response to a unit step change, in this video I'll cover how we can derive the transfer function so we can predict how our system will respond...
See More
Drone Simulation and Control, Part 2: How Do You Get a Drone to Hover?
13 min
Beginner
Video
Theory
In the last video, we showed we can manipulate the four motors of a quadcopter to maneuver it in 3D space by getting it to roll, pitch, yaw, and change its thrust. We also covered the four...
See More
Control Systems Lectures - Time and Frequency Domain
10 min
Beginner
Video
Theory
This lecture introduces the time and frequency domains. A very quick description of the Laplace Transform is given which will be the base of many of classical control lectures in the future...
See More
Second Order Dynamics Example
4 min
Beginner
Video
Theory
How will a second order process respond in the time domain when subjected to a unit step input? What other behaviors can we expect to see and why? Tune in to...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 9 - Policy Gr...
74 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More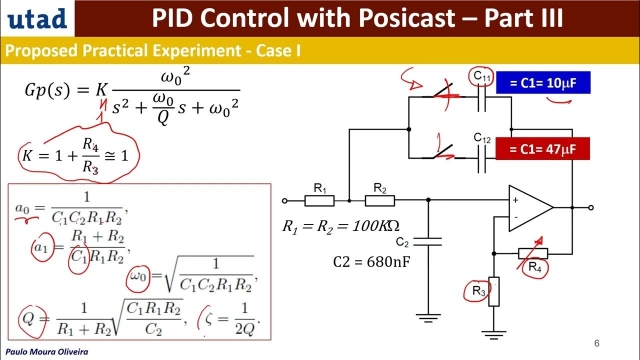
PID Control with Posicast, 9 - (In English)
11 min
Beginner
Video
Theory
This is part III of PID control with Posicast
See More
Data Preprocessing and the Short-Time Fourier Transform | Deep Learning for ...
16 min
Beginner
Video
Theory
Data in its raw form might not be ideal for training a network. There are some changes we can make to the data that are often desired or sometimes necessary in order to make training faster...
See More
Peter Ponders PID - Feed Forward Theory and Calculations
6 min
Beginner
Video
Theory