

Filters
Type
Experience
Scope
944 items

Frequency domain – tutorial 4: Gibbs phenomenon
4 min
Beginner
Video
Theory
In this video, we quickly review the Gibbs phenomenon which involves two facts:1) Fourier sums overshoot at a jump discontinuity2) overshoot does not disapp...
See More
Peter Ponders PID - Observers/Estimators
26 min
Beginner
Video
Theory
")
Principal Component Analysis (PCA)
13 min
Beginner
Video
Theory
Principal component analysis (PCA) is a workhorse algorithm in statistics, where dominant correlation patterns are extracted from high-dimensional data.
See More
Routh Array and Stability
7 min
Beginner
Video
Theory
I show how we can find the range of allowed controller gains for a system that will allow us to maintain stability using a Routh Array.
See More
Lecture 17: Introduction to Compensators/Controllers
35 min
Beginner
Video
Theory

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 7 - Imitation...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
See More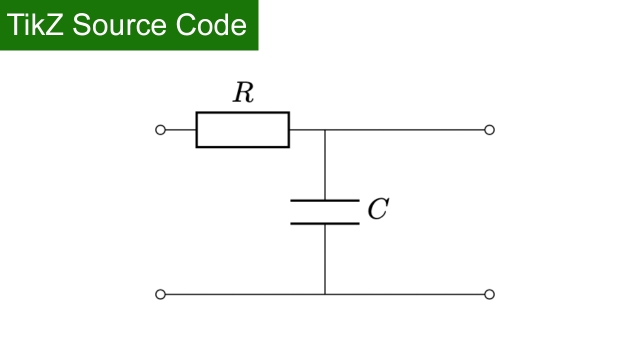
TikZ source Code: RC Lowpass
Beginner
Source Code
Application
TikZ source code for an RC Lowpass filter.
See More
Standard 2nd Order ODEs: Natural Frequency and Damping Ratio
94 min
Beginner
Video
Theory
In this video we discuss writing 2nd order ODEs in standard form xdd(t)+2*zeta*wn*xd(t)+wn^2*x(t)where zeta = damping ratio wn = natural ...
See More![Stability and Eigenvalues [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_289.jpg?itok=dbD4O7ru)
Stability and Eigenvalues [Control Bootcamp]
19 min
Beginner
Video
Theory
Here we discuss the stability of a linear system (in continuous-time or discrete-time) in terms of eigenvalues. Later, we will actively modify these eigenvalues, and hence the dynamics...
See More")
Koopman Spectral Analysis (Representations)
16 min
Intermediate
Video
Theory
In this video, we explore how to obtain finite-dimensional representations of the Koopman operator from data, using regression.
See More
Overview of Dempster-Shafer Theory (Evidence Theory)
Beginner
Article / Blog
Theory
This is an overview of Dempster-Shafer Theory (Evidence Theory) that provides an introduction, definition, basic information about combination rules, some issues with the theory, and the...
See More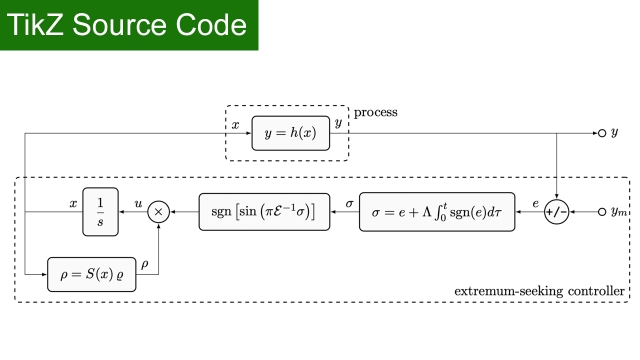
TikZ source Code: Extremum Seeking Control Block Diagram
Beginner
Source Code
Application
TikZ source Code: Extremum Seeking Control Block Diagram
See More
Understanding Sensor Fusion and Tracking, Part 3: Fusing a GPS and IMU to Es...
14 min
Beginner
Video
Theory
This video continues our discussion on using sensor fusion for positioning and localization by showing how we can use a GPS and an IMU to estimate and object’s orientation and position. We...
See More
Euler Angles and the Euler Rotation Sequence
70 min
Beginner
Video
Theory
In this video we discuss how Euler angles are used to define the relative orientation of one coordinate frame to another.Topics and Timestamps:0:00 – Introd...
See More![Degrees of Controllability and Gramians [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_305.jpg?itok=6ZkiWCDa)
Degrees of Controllability and Gramians [Control Bootcamp]
15 min
Beginner
Video
Theory
This lecture discusses degrees of controllability using the controllability Gramian and the singular value decomposition of the controllability matrix.
See More![Randomized SVD Code [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_402.jpg?itok=pmR7mX3g)
Randomized SVD Code [Python]
10 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Python code).
See More
Using ‘minreal’ in Matlab to Perform Transfer Function Pole/Zero Cancellatio...
18 min
Beginner
Video
Application
In this tutorial we look at using the ‘minreal’ function in Matlab to perform pole/zero cancellation from transfer functions.Topics and time stamps:(0:10) – ...
See More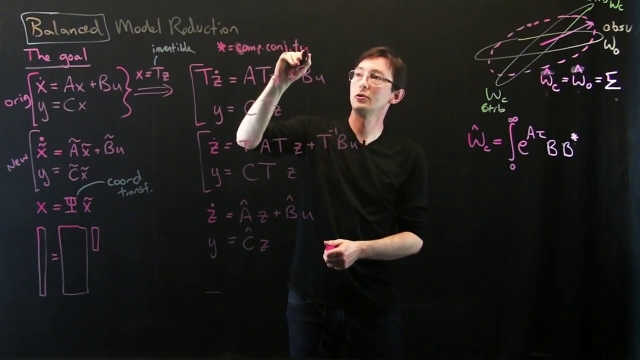
Data-Driven Control: Change of Variables in Control Systems
14 min
Intermediate
Video
Theory
In this lecture, we discuss how linear control systems transform under a change of coordinates in the state variable. This will be useful to derive balancing transformations that identify...
See More![SVD: Eigenfaces 4 [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_418.jpg?itok=dWTN1neh)
SVD: Eigenfaces 4 [Matlab]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used to efficiently represent human faces, in the so-called "eigenfaces" (Matlab code, part 4).
See More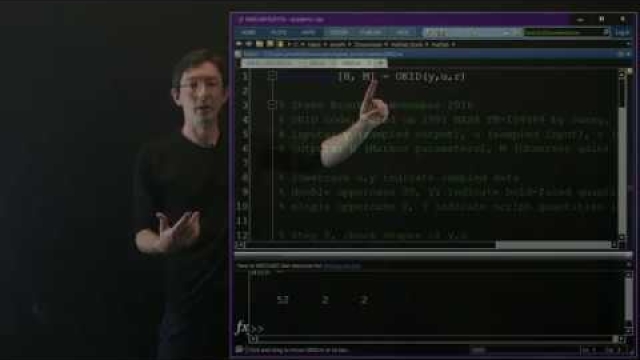
Data-Driven Control: ERA/OKID Example in Matlab
8 min
Intermediate
Video
Application
In this lecture, we explore the observer Kalman filter identification (OKID) and eigensystem realization algorithm (ERA) in Matlab on an example.
See More![SVD: Optimal Truncation [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_423.jpg?itok=Op0DbiId)
SVD: Optimal Truncation [Matlab]
12 min
Intermediate
Video
Application
This video describes how to optimally truncate the singular value decomposition (SVD) for noisy data (Matlab code).
See More
Derivation of the 2D Wave Equation
27 min
Beginner
Video
Theory
In this video we derive the 2D wave equation. This partial differential equation governs the motion of waves in a plane and is applicable for thin vibrating...
See More
Discrete-Time Dynamical Systems
9 min
Intermediate
Video
Theory
This video shows how discrete-time dynamical systems may be induced from continuous-time systems.
See More
Control Bootcamp: Three Equivalent Representations of Linear Systems
12 min
Beginner
Video
Theory
This video explores three equivalent representations of linear systems: State-space ODEs, Frequency domain transfer functions, and Time-domain impulse response convolution.
See More
Fuzzy Logic, Part 3: Design and Applications of a Fuzzy Logic Controller
17 min
Beginner
Video
Theory
This video walks you through the process of designing a fuzzy inference system that can balance a pole on a cart. You can design a fuzzy logic controller using just experience and intuition...
See More