

Filters
Type
Experience
Scope
944 items
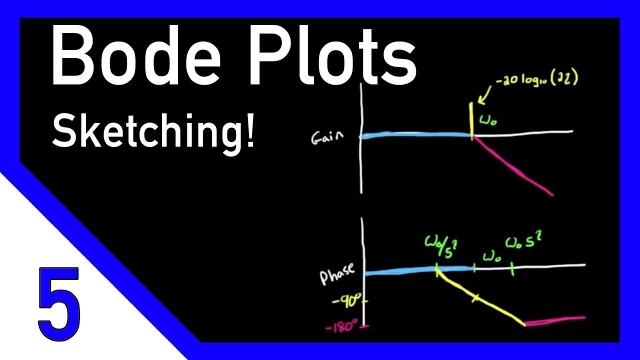
Bode Plots by Hand: Complex Poles or Zeros
11 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
The Laplace Transform - A Graphical Approach
13 min
Beginner
Video
Theory
A lot of books cover how to perform a Laplace Transform to solve differential equations. This video tries to show graphically what the Laplace Transform is doing and why figuring out the...
See More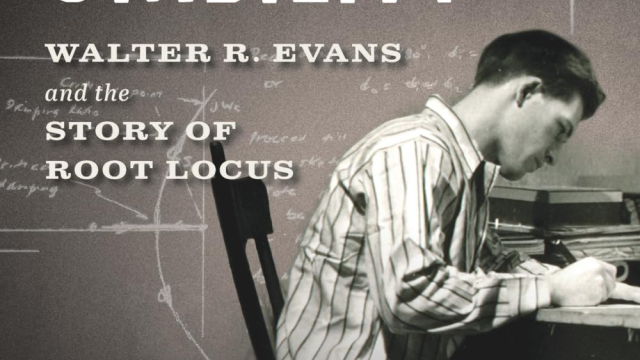
Into Stability: Walter R Evans and the Story of Root Locus
Beginner
Book
Theory
In the aftermath of World War II, engineers faced challenges their slide rules couldn’t solve. Walter R. Evans wasn’t looking to change the world—he just wanted to help engineers see clearly...
See More")
Control Bootcamp: Sensitivity and Complementary Sensitivity (Part 2)
8 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance. (Part 2)
See More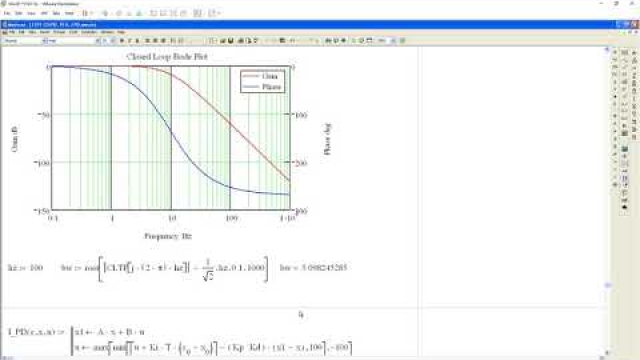
Peter Ponders PID - Closed Loop Zeros
13 min
Beginner
Video
Theory
This video covers closed loop zeros, what causes zeros and the benefits and drawbacks of closed loop zeros.
See More")
A Nonlinear, 6 DOF Dynamic Model of an Aircraft: the Research Civil Aircraft...
103 min
Beginner
Video
Theory
In this video we develop a dynamic model of an aircraft by describing forces and moments generated by aerodynamic, propulsion, and gravity that act on the ai...
See More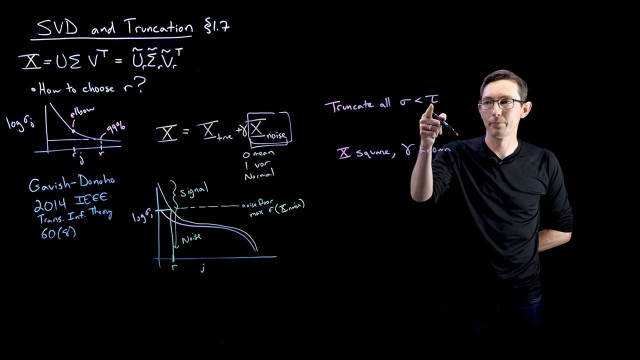
SVD and Optimal Truncation
11 min
Intermediate
Video
Theory
This video describes how to truncate the singular value decomposition (SVD) for matrix approximation.
See More
Peter Ponders PID- Motor position control
16 min
Beginner
Video
Theory

Controllability of a Linear System: The Controllability Matrix and the PBH T...
97 min
Beginner
Video
Theory
In this video we explore controllability of a linear system. We discuss two methods to test for controllability, the controllability matrix as well as the P...
See More
The Frobenius Norm for Matrices
2 min
Intermediate
Video
Theory
This video describes the Frobenius norm for matrices as related to the singular value decomposition (SVD).
See More

Drone Simulation and Control, Part 2: How Do You Get a Drone to Hover?
13 min
Beginner
Video
Theory
In the last video, we showed we can manipulate the four motors of a quadcopter to maneuver it in 3D space by getting it to roll, pitch, yaw, and change its thrust. We also covered the four...
See More
Control Systems Lectures - Time and Frequency Domain
10 min
Beginner
Video
Theory
This lecture introduces the time and frequency domains. A very quick description of the Laplace Transform is given which will be the base of many of classical control lectures in the future...
See More
dRehmFlight VTOL - Teensy (Arduino) Flight Controller and Stabilization
5 min
Beginner
Video
Application
dRehmFlight VTOL is a new flight controller and stabilization package intended to be used for small to medium sized hobby or research projects. dRehmFlight is the code, and the physical...
See More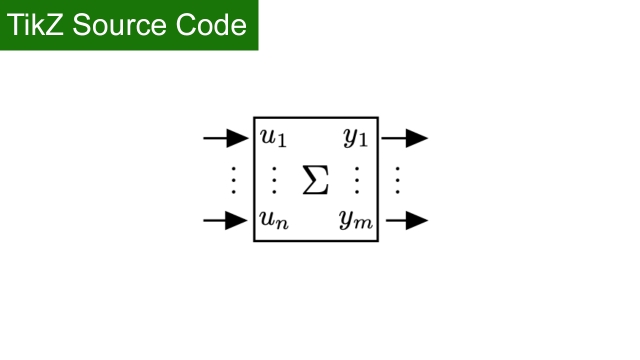
TikZ source Code: A single MIMO system
Beginner
Source Code
Application
TikZ source Code: A single MIMO system
See More
Derivation of the 1D Wave Equation
26 min
Beginner
Video
Theory
In this video, we derive the 1D wave equation. This partial differential equation (PDE) applies to scenarios such as the vibrations of a continuous string. ...
See More
Manipulating Aerodynamic Coefficients
25 min
Intermediate
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as CL and CD.
See More
Frequency domain – tutorial 12: FT of periodic signals
10 min
Beginner
Video
Theory
In this video, we learn how to find the Fourier transform for periodic signals. The following materials are covered:1) relation between Fourier transform and...
See More
Parseval's Theorem
5 min
Intermediate
Video
Theory
Parseval's theorem is an important result in Fourier analysis that can be used to put guarantees on the accuracy of signal approximation in the Fourier domain.
See More
Neural Networks: Caveats
8 min
Beginner
Video
Theory
This lecture discusses some key limitations of neural networks and suggests avenues of ongoing development.
See More

Setting Up Your Radio Connection - dRehmFlight VTOL
4 min
Beginner
Video
Application
This video will show you how to set up your radio to work with dRehmFlight VTOL. The code supports PWM, PPM, and SBUS type receivers, allowing you to connect and use 6 channels within the...
See More
Time domain - tutorial 6: elementary signals
11 min
Beginner
Video
Theory
In this video, we cover two elementary signals, unit step and unit impulse, which will be extensively used in this course. The following materials are covere...
See More
Lecture 13: Stability and Routh Hurwitz criterion
31 min
Beginner
Video
Theory

Control systems with non-minimum phase dynamics
8 min
Beginner
Video
Theory
This video describes control systems that have non-minimum phase dynamics, characterized by a zero of the input--output transfer function in the right-half-plane. Physically, these systems...
See More