

Filters
Type
Experience
Scope
944 items
![Fourier Series [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_362.jpg?itok=VuzjvIsu "Fourier Series [Python]")
Fourier Series [Python]
8 min
Beginner
Video
Application
This video will describe how to compute the Fourier Series in Python.
See More
Understanding Model Predictive Control, Part 3: MPC Design Parameters
8 min
Beginner
Video
Theory
To successfully control a system using an MPC controller, you need to carefully select its design parameters. This video provides recommendations for choosing the controller sample time...
See More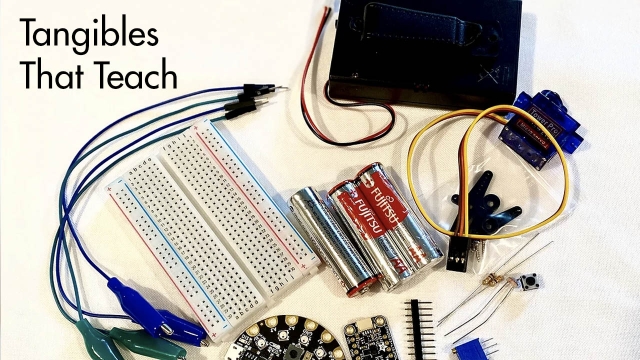
Instrument Kit for ME 316
Beginner
Hardware
Application
This hardware kit accompanies the textbook "Project Based Engineering Instrumentation with CircultPython" by Dr. Carlos Montalvo. Using this hardware and the textbook you’ll build some...
See More
Frequency domain – tutorial 7: Fourier transform examples marathon
46 min
Beginner
Video
Theory
In this video, we solve lots of lots examples to practice how to quickly find Fourier transform using table of pairs and properties. The learning objective i...
See More
Frequency domain – tutorial 5: Fourier transform
9 min
Beginner
Video
Theory
In this video, we learn about Fourier transform which enables us to travel from time to frequency domain when a signal is not periodic. The learning objectiv...
See More
Lecture 4: Electromechanical system Transfer functions and Analogous circuit...
31 min
Beginner
Video
Theory

Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 8 - Policy Gr...
71 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
Posicast Control 2 - ( In English )
5 min
Beginner
Video
Theory
This video is about the Half-Cycle Posicast. It includes some hints about how to simulate this type of control using Simulink
See More
Second Order Dynamics in Process Control
17 min
Beginner
Video
Theory
How do we simulate two first order transfer functions in series, a inherently second order system, or two coupled differential equations? Tune in to find out!
See More
Peter Ponders PID - LQR Optimizing Two Outputs
16 min
Beginner
Video
Theory

RL Course by David Silver - Lecture 2: Markov Decision Process
102 min
Intermediate
Video
Theory
Explores Markov Processes including reward processes, decision processes and extensions.
See More
Understanding PID Control, Part 2: Expanding Beyond a Simple Integral
10 min
Beginner
Video
Theory
The first video in this series described a PID controller, and it showed how each of the three branches help control your system.That seemed simple enough and appeared to work. However, in...
See More
Visually Determining Transfer Functions
6 min
Beginner
Video
Theory
Process Control classes can get pretty hard to follow when you lose sight of what transfer functions really are. How do you get them in the first place?
See More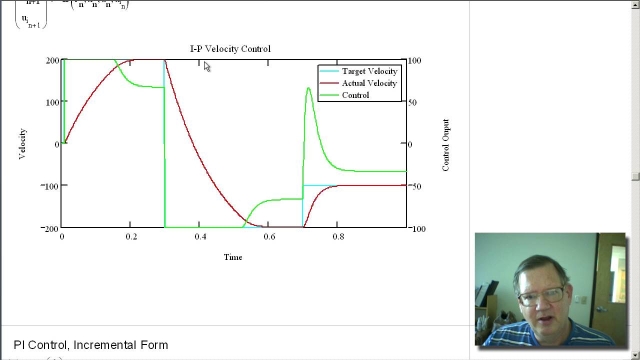
Peter Ponders PID - Controlling a non-integrating single pole system. Part 3...
9 min
Beginner
Video
Theory
Part 3 uses PI control which is the only practical means of control a non-integrating single pole system.http://deltamotion.comhttp://forum.deltamotion.com
See More
Control System with MATLAB - Block Diagram Reduction
32 min
Beginner
Video
Theory
Bode Plots by Hand: Real Constants
8 min
Beginner
Video
Theory
This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a simple transfer function; a real constant.
See More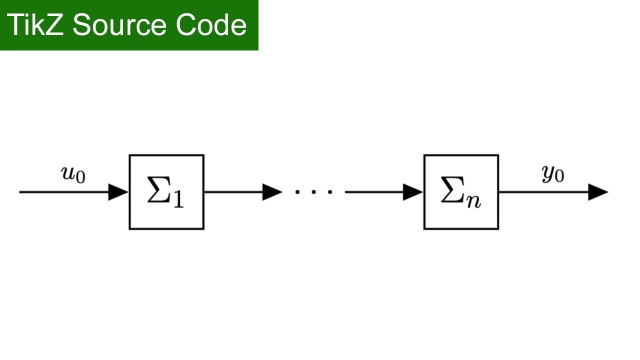
TikZ source Code: Cascade of several subsystems
Beginner
Source Code
Application
TikZ source Code: Cascade of several subsystems.
See More
Designing a Lag Compensator with Root Locus
11 min
Beginner
Video
Theory
This video walks through a phase lag compensator example using the Root Locus method.
See More
Routh-Hurwitz Criterion, Beyond Stability
11 min
Beginner
Video
Theory
This video explains of few uses of the Routh-Hurwitz Criterion that go beyond simply determining how many poles exist in the right half plane. I cover how to determine gain margin and how...
See More
IIR Filters - Theory and Implementation (STM32)
20 min
Intermediate
Video
Application
Tutorial on IIR (Infinite Impulse Response) digital filters, including digital filtering overview, IIR filter theory, FIR vs IIR, Z-transform design/analysis, design using analogue...
See More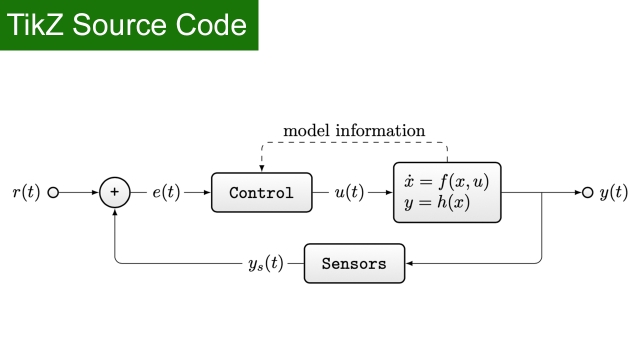
TikZ source Code: Feedback system
Beginner
Source Code
Application
TikZ source Code: Feedback system
See More
Singular Value Decomposition (SVD): Matrix Approximation
14 min
Intermediate
Video
Theory
This video describes how the singular value decomposition (SVD) can be used for matrix approximation.
See More
Simulating the Logistic Map in Matlab
16 min
Intermediate
Video
Application
This video shows how simple it is to simulate discrete-time dynamical systems, such as the Logistic Map, in Matlab.
See More
Linearizing a Simulink Model Using the Linear Analysis Tool and ‘linmod’
55 min
Beginner
Video
Application
In this video we show how to linearize a non-linear Simulink model using numerical techniques. This approach is extremely powerful as it allows automatic ge...
See More
Data-Driven Control: ERA and the Discrete-Time Impulse Response
5 min
Intermediate
Video
Theory
In this lecture, we describe how the discrete-time impulse response is used in the eigensystem realization algorithm (ERA).
See More