

Filters
Type
Experience
Scope
944 items
Multi-Agent Reinforcement Learning: Independent vs Cooperative Agents
Intermediate
Conference Paper
Theory
From the Abstract:
Intelligent human agents exist in a cooperative social environment that facilitates learning. They learn not only by trialand -error, but also through cooperation by...
See More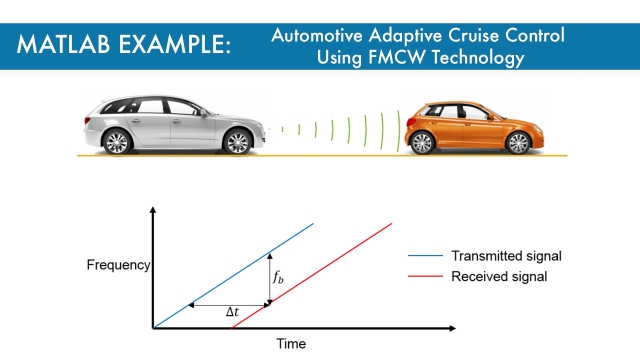
Automotive Adaptive Cruise Control Using FMCW Technology
Intermediate
Example
Application
This MATLAB example shows how to model an automotive adaptive cruise control system using the frequency modulated continuous wave (FMCW) technique. This example performs range and Doppler...
See More
Python Control Systems Library
Intermediate
Software
Application
The python-control package is a set of python classes and functions that implement common operations for the analysis and design of feedback control systems. The initial goal is to implement...
See More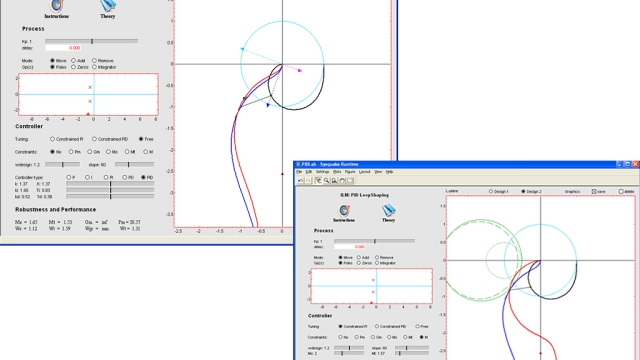
Interactive Tool for Loop Shaping understanding based on PID control
Intermediate
App
Application
Loop shaping is a design method where it is attempted to choose a controller such that the loop transfer function obtains the desired shape. In this module the loop transfer function is...
See More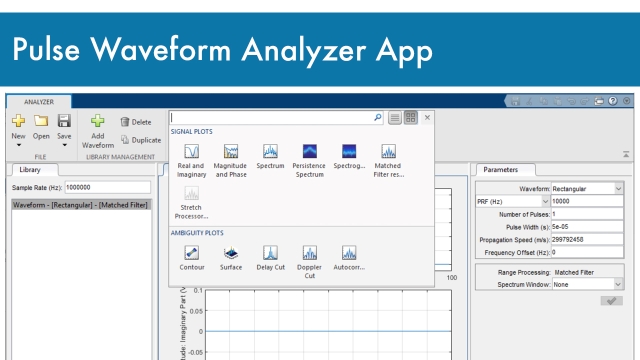
Pulse Waveform Analyzer App
Intermediate
App
Application
The Pulse Waveform Analyzer app lets you explore the properties of signals commonly used in radar. You can display 2-D and 3-D plots that let you visualize waveform time series and spectra.
... See More
Suspending a pendulum in its inverted position using a jig saw (Take 1, norm...
1 min
Beginner
Video
Demonstration
When a pendulum is attached to a jig saw, strange things can happen! :)
See More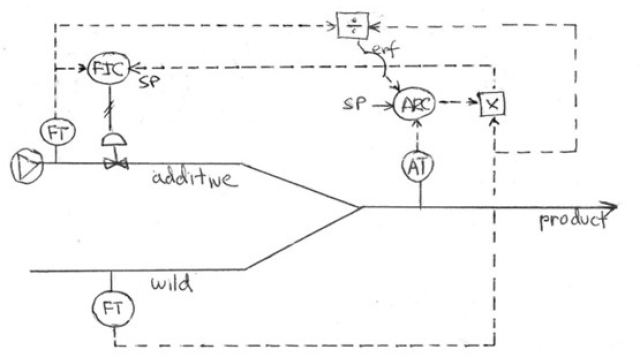
Ratio Control and Scaled Signal Calculations
15 min
Intermediate
Article / Blog
Application
When and how to use Ratio Control and use Scaled Signals
See More
Why the Riccati Equation Is important for LQR Control
14 min
Intermediate
Video
Theory
This Tech Talk looks at an optimal controller called linear quadratic regulator, or LQR, and shows why the Riccati equation plays such an important role in solving it efficiently. The talk...
See More![Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_490.jpg?itok=qWteM4RS "Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]")
Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]
12 min
Beginner
Video
Theory
Here we use the 'place' command in Matlab to design full-state feedback gains to specify the eigenvalues of the closed-loop system. This is demonstrated on the inverted pendulum on a cart.
See More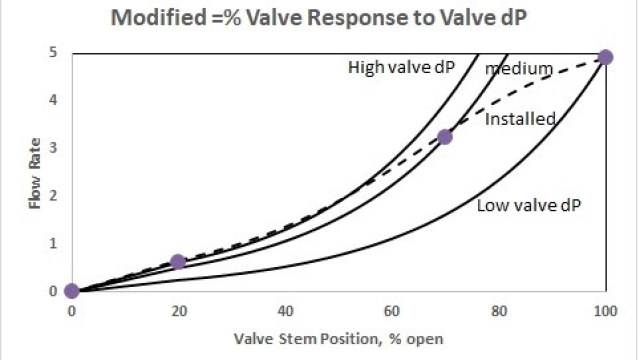
Understanding Valve Flow Characteristics
20 min
Intermediate
Article / Blog
Application
The response of flow rate through a control valve depends on the friction losses in the piping in which it is installed as well as the controller signal. The installed characteristic (a...
See More
Control Loop Foundation Batch and Continuous Processes - Interactive Source ...
Intermediate
Virtual Lab
Application
Control Loop Foundation contains workshops that allow the reader to get hands on experience through this web interface. Once a lab is selected, then you may access workshop directions and...
See More
PID Explained
20 min
Beginner
Article / Blog
Theory
A qualitative explanation of P, I, & D actions using graphs.
See More
Computing Euler Angles: Tracking Attitude Using Quaternions
74 min
Beginner
Video
Theory
In this video we continue our discussion on how to track the attitude of a body in space using quaternions. The quaternion method is similar to the Euler Ki...
See More
Understanding Control Systems (Playlist)
Beginner
Video
Theory
Learn the basic concepts behind controls systems. Walk through everyday examples that outline fundamental ideas, and explore open-loop and feedback control systems. These videos explore open...
See More
System Identification: Full-State Models with Control
10 min
Intermediate
Video
Theory
This lecture provides an overview of modern data-driven regression methods for linear and nonlinear system identification, based on the dynamic mode decomposition (DMD), Koopman theory, and...
See More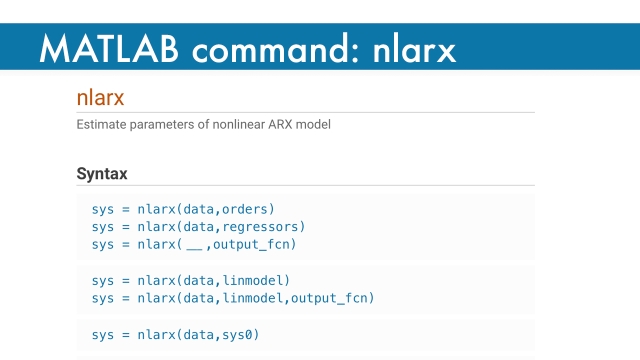
MATLAB Documentation page: nlarx command
Intermediate
Article / Blog
Application
This is the Mathworks documentation page for the nlarx MATLAB command.
See More
Model Reference Adaptive Control Part-1
60 min
Beginner
Video
Theory
Video course on nonlinear and adaptive control by Dr. Shubhendu Bhasin, Department of Electrical Engineering, IIT Delhi.
See More
Autonomous Navigation, Part 6: Metrics for System Assessment
15 min
Beginner
Video
Theory
Take a systems engineering approach to verifying the autonomous navigation system end to end and learn how simulations and physical tests can complement each other. The video also covers a...
See More
Full Stack Deep Learning
Intermediate
Course
Theory
There are many great courses to learn how to train deep neural networks. However, training the model is just one part of shipping a deep learning project. This course teaches full-stack...
See More
Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More
Projectile Motion Equations and Theory
28 min
Beginner
Video
Application
In this video, an important topic under 2D Kinematics i.e. Projectile Motion, is covered. Its theory, equations, and examples are thoroughly discussed.
See More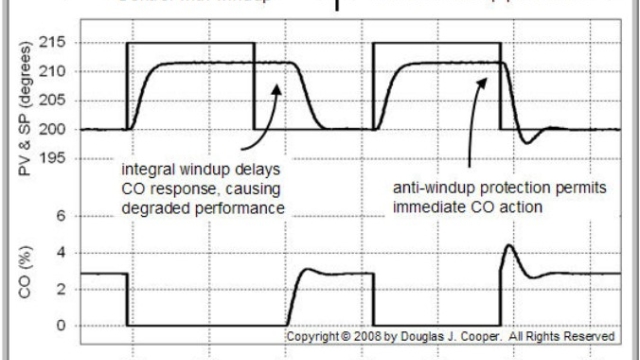
Integral Wind-Up and Solution
Intermediate
Article / Blog
Application
What is integral wind-up and how velocity mode solves it.
See More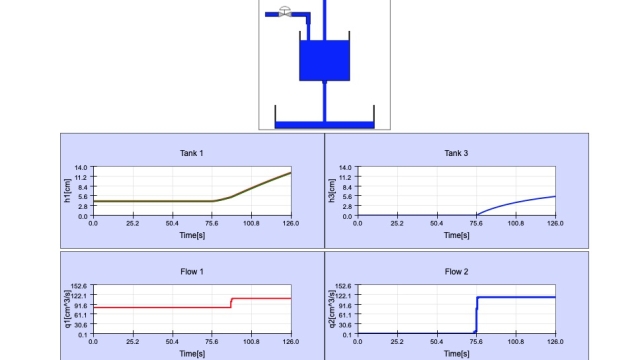
Virtual Lab for a Two-tanks system
Beginner
Virtual Lab
Application
This is a virtual lab for a two-tank system that can be used for modelling and control learing/teaching purposes. Open-loop tests and closed-loop simulatons based on PI control or PI plus...
See More
Averaging Methods in Nonlinear Dynamical Systems
Intermediate
Book
Theory
Perturbation theory and in particular normal form theory has shown strong growth during the last decades. So it is not surprising that the authors have presented an extensive revision of the...
See More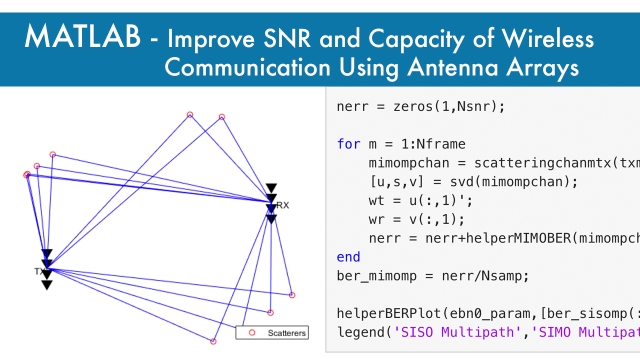
Improve SNR and Capacity of Wireless Communication Using Antenna Arrays
Beginner
Example
Application
The goal of a wireless communication system is to serve as many users with the highest possible data rate given constraints such as radiation power limit and operating budget. To improve the...
See More