

Filters
Type
Experience
Scope
944 items
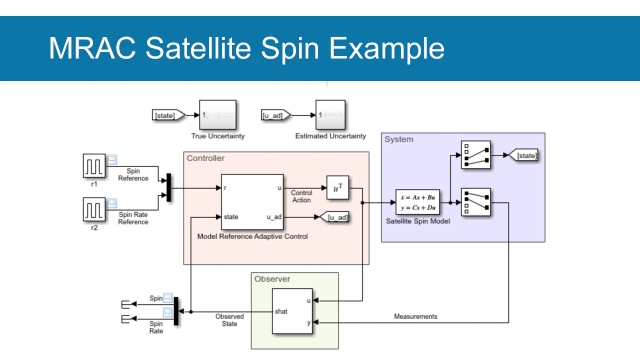
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More
Wind Tunnel Data Analysis and Testing Considerations
111 min
Intermediate
Video
Theory
This is the last video in our 3 part series on wind tunnel testing. In this video, we discuss what typical plots of wind tunnel data might look like and how to extract relevant information...
See More
What are Lead Lag Compensators? An Introduction.
11 min
Beginner
Video
Theory
This videos covers the very basic definition of what a lead/lag compensator is. Every control system engineer should have a basic understanding of lead/lag compensators since along with PID...
See More
Control Bootcamp: Observability Example in Matlab
8 min
Beginner
Video
Application
This video explores observability in Matlab on the example system of an inverted pendulum on a cart.
See More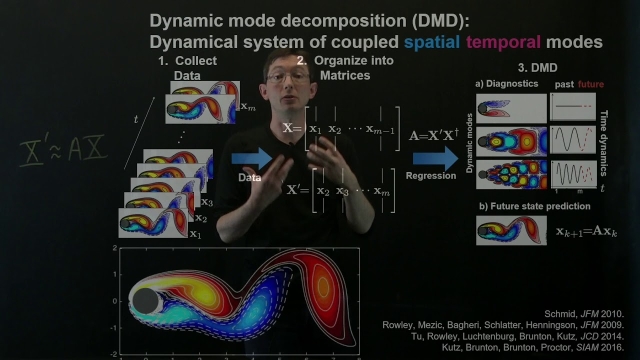
Dynamic Mode Decomposition (Overview)
18 min
Intermediate
Video
Theory
In this video, we introduce the dynamic mode decomposition (DMD), a recent technique to extract spatio-temporal coherent structures directly from high-dimensional data. DMD has been widely...
See More
3D Kinematics, Free Falling, Reference Frames
53 min
Intermediate
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
What are Transfer Functions? | Control Systems in Practice
10 min
Beginner
Video
Theory
This video introduces transfer functions - a compact way of representing the relationship between the input into a system and its output. It covers why transfer functions are so popular and...
See More
Passivity-Based Control to Guarantee Stability | Control Systems in Practice...
15 min
Beginner
Video
Theory
Learn about passivity-based control to guarantee closed-loop stability of feedback systems. Consider different ways to assess the stability of systems other than looking at gain and phase...
See More
Model Identification and Adaptive Control - From Windsurfing to Telecommunic...
Beginner
Book
Theory
This book is based on a workshop entitled: "Model Identification and Adaptive Control: From Windsurfing to Telecommunications" held in Sydney, Australia, on December 16, 2000. The workshop...
See More
Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields...
Beginner
Book
Theory
From the reviews: "This book is concerned with the application of methods from dynamical systems and bifurcation theories to the study of nonlinear oscillations. Chapter 1 provides a review...
See More
Robust Control, Part 3: Disk Margins for MIMO Systems
16 min
Beginner
Video
Theory
This video shows how margin can be used to assess the robustness of multi-input, multi-output systems. We’ll show how disk margin is a more complete way to represent margin for MIMO systems...
See More
Toys for Control Education
Intermediate
App
Theory
Teaching materials for control engineering education that run in web browsers. Speed control, position control, step response of 2nd order system, pole and impulse response, and rocket.
See More
Process Control is Inventory Control
10 min
Beginner
Article / Blog
Application
You change the inventory of heat to change temperature. You change the inventory of material to change level. Understanding how the inventory relates to the controlled variable is...
See More
So You Want to be a Systems Engineer
53 min
Beginner
Video
Theory
A presentation by Gentry Lee on what qualities and characteristics make a great systems engineer. At the time of the presentation, Gentry Lee was the Chief Engineer for the Solar System...
See More
Základy automatizácie a teórie systémov – videokurz (Slovak)
Beginner
Article / Blog
Theory
Pozrite si videokurz zo základov teórie systémov a automatizácie. Náš kurz má 7 lekcií.
See More
Control Valve Problems
20 min
Intermediate
Article / Blog
Application
Control valve problems can severely affect control loop performance and, unless eliminated, they can make controller tuning a challenging (sometimes impossible) task. Some problems are quite...
See More
Understanding the Discrete Fourier Transform and the FFT
19 min
Beginner
Video
Theory
The discrete Fourier transform (DFT) transforms discrete time-domain signals into the frequency domain. The most efficient way to compute the DFT is using a fast Fourier transform (FFT)...
See More
MATLAB Documentation page: idLinear mapping object
Intermediate
Article / Blog
Application
This is the Mathworks documentation page for the idLinear mapping object.
See More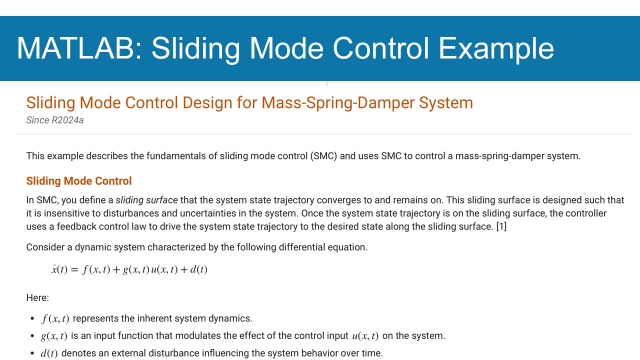
Sliding Mode Control Design for Mass-Spring-Damper System
Intermediate
Example
Application
This MATLAB/Simulink example describes the fundamentals of sliding mode control (SMC) and uses SMC to control a mass-spring-damper system.
See More![Linear Regression 1 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_436.jpg?itok=dYATpI15 "Linear Regression 1 [Python]")
Linear Regression 1 [Python]
6 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 1).
See More
Control Bootcamp: Sensitivity and Complementary Sensitivity
11 min
Beginner
Video
Theory
Here we explore the sensitivity and complementary sensitivity functions, which are critical in understanding robustness and performance.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 15 - Batch Re...
79 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
")
Building a Matlab/Simulink Model of an Aircraft: the Research Civil Aircraft...
51 min
Beginner
Video
Application
In this video we implement the RCAM model as a Matlab script that is called from a Simulink model. The result is a fully encapsulated Simulink model of a no...
See More
Extremum Seeking Control: Challenging Example
8 min
Intermediate
Video
Theory
This lecture explores the use of extremum-seeking control (ESC) to solve a challenging control problem with a right-half plane zero.
See More
NASA's General Mission Analysis Tool (GMAT)
Advanced
Software
Application
NASA's GMAT is the worlds only enterprise, multi-mission, open source software system for space mission design, optimization, and navigation. The system supports missions in flight regimes...
See More