

Filters
Type
Experience
Scope
944 items
Multi-agent reinforcement learning: An overview
Intermediate
Peer Reviewed Paper
Theory
From the abstract:
Multi-agent systems can be used to address problems in a variety of do- mains, including robotics, distributed control, telecommunications, and economics. The complexity...
See More
Post-Pandemic: A Hybrid Lab Experience
Beginner
Article / Blog
Application
This article discusses the importance of a hybrid laboratory model, blending physical hardware with digital twins. Example using the Quanser Interactive Lab (QLabs) platform is given.
See More
1D Kinematics - Speed, Velocity, Acceleration
51 min
Beginner
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More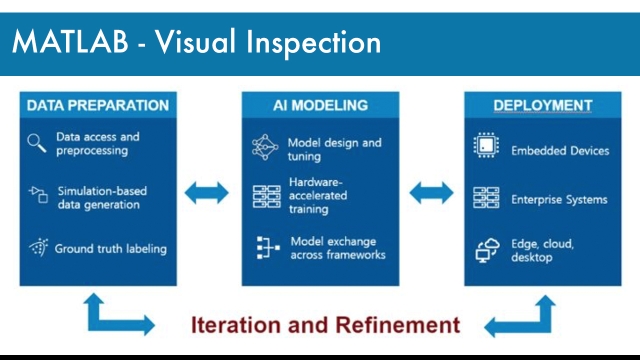
MATLAB Discovery Page - Visual Inspection
Beginner
Article / Blog
Theory
Visual inspection is the image-based inspection of parts where a camera scans the part under test for both failures and quality defects. Automated inspection and defect detection are...
See More
Interactive Course for Control Theory
Beginner
Course
Theory
Control Theory is a topic that finds a widespread application throughout engineering and natural sciences. It is very common in electrical, mechanical and process engineering. Especially...
See More
Nonlinear System Identification | System Identification, Part 3
17 min
Beginner
Video
Theory
Learn about nonlinear system identification by walking through one of the many possible model options: A nonlinear ARX model. Brian Douglas covers the importance of adding an offset term to...
See More
What are Phased Arrays?
17 min
Beginner
Video
Theory
This video introduces the concept of phased arrays. An array refers to multiple sensors, arranged in some configuration, that act together to produce a desired sensor pattern. With a phased...
See More
Regulatory PID (Polish)
18 min
Beginner
Video
Theory
W tym odcinku, opisze wam podstawy działania regulatorów PID.
See More
Vibrational control of nonlinear systems: Vibrational controllability and tr...
Intermediate
Peer Reviewed Paper
Theory
In the first part of this work, the criteria for the existence of stabilizing parametric oscillations have been derived. In the present paper, the problem of choosing the stabilizing...
See More
Systems Engineering, Part 2: Towards a Model-Based Approach
13 min
Beginner
Video
Theory
The role of systems engineering is to help find and maintain a balance between the stakeholder needs, the management needs, and the engineering needs of a project. So we can think of it as...
See More
Simulink Onramp
120 min
Beginner
Tutorial
Demonstration
Learn the basics of how to create, edit, and simulate models in Simulink®. Use block diagrams to represent real-world systems and simulate components and algorithms.
See More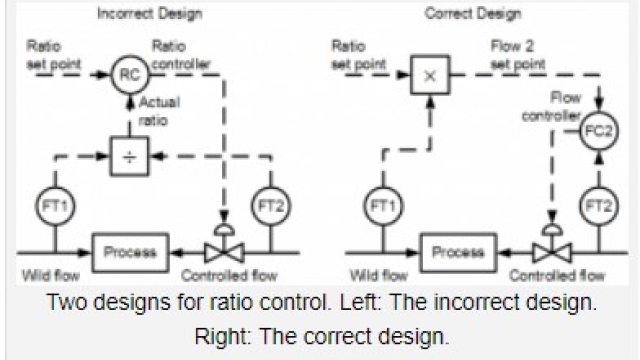
Ratio Control - the right and wrong approach
15 min
Intermediate
Article / Blog
Application
A discussion as to why the ratio should be the MV (controller output) not the CV.
See More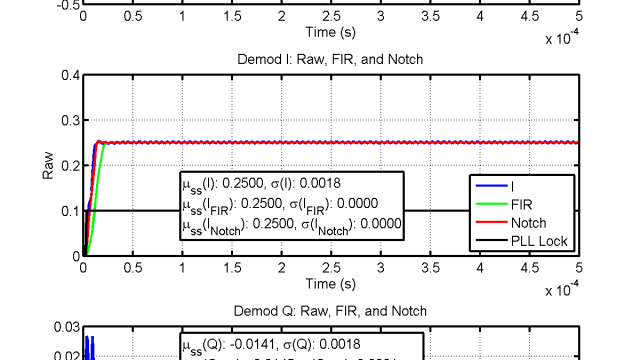
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
47 min
Intermediate
Video
Theory
Video talk of the paper by the same name.
See More
Reinforcement Learning: An Introduction
Beginner
Book
Theory
From the book introduction:
The idea that we learn by interacting with our environment is probably the first to occur to us when we think about the nature of learning. When an infant plays...
See More
Reinforcement Learning with MATLAB.
Beginner
Course
Application
This repository contains series of modules to get started with Reinforcement Learning with MATLAB.
It is divided into 4 stages.
In Stage 1, we start with learning RL concepts by manually...
See More
OIT System Design Laboratory (Japanese)
Beginner
Video
Demonstration
A collection of video lectures from OIT SDL.
See More
How Antennas Work
8 min
Intermediate
Video
Theory
Antennas constitute as a major component in various communication systems, signal transmission and many others. It is important to understand how they work and create propagating waves in...
See More
Feedforward tuning rules for measurable disturbances with PID control: a tut...
Intermediate
Peer Reviewed Paper
Theory
Feedforward control can be considered as the most well-known control approach to deal with measurable disturbances. It started to be used almost 100 years ago, and since then it is being...
See More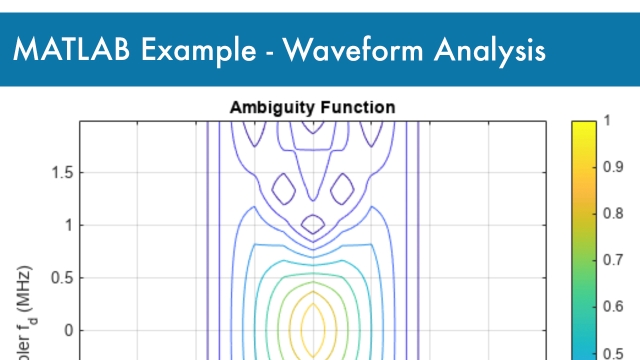
MATLAB Example: Waveform Analysis Using the Ambiguity Function
Intermediate
Example
Application
This example shows how to use the ambiguity function to analyze waveforms. It compares range and Doppler capabilities of several common pulsed waveforms such as the rectangular waveform, the...
See More
Basic course of control theory (Hungarian and English)
Beginner
Article / Blog
Theory
The basic course of control theory is taught in the 3rd year for the students specialized in information technology at the Faculty of Electrical Engineering and Informatics of the Budapest...
See More
How are Beamforming and Precoding Related?
12 min
Beginner
Video
Theory
Explains the relationship between Beamforming and Precoding in multi-antenna communication systems. Also discusses the relationship to Diversity.
See More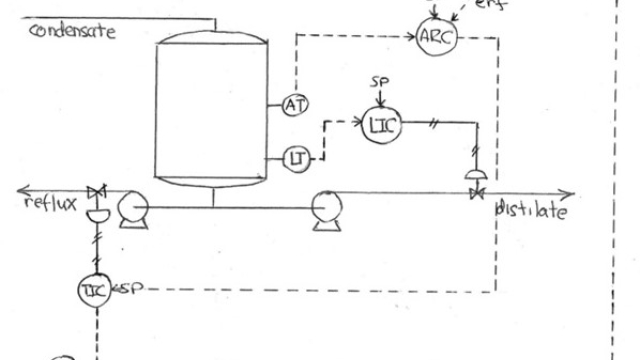
Cascade Control
15 min
Intermediate
Article / Blog
Application
When and how to use Cascade Control
See More
Nyquist Stability Criterion
15 min
Beginner
Article / Blog
Theory
The Wikipedia article on Nyquist Stability Criterion. This covers the Nyquist plot, the Cauchy argument principle, and the stability criterion itself. A mathematical derivation is also...
See More
Adaptive Control (Part II) —Modeling the X-15’s Adaptive Flight Control Syst...
Intermediate
Article / Blog
Theory
This blog post shows how to build from scratch a Simulink model of the famous MH-96, the X-15's Adaptive Flight Control System
See More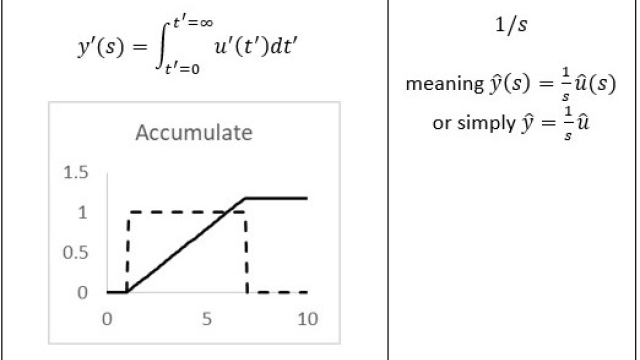
No! Not Laplace Transforms
60 min
Intermediate
Course
Theory
In my 13-year industrial career, I never used Laplace transforms. However, transfer functions and block diagram notation are efficient methods to describe dynamic behaviors, and are often...
See More