

Filters
Type
Experience
Scope
944 items

System Identification: DMD Control Example
8 min
Intermediate
Video
Theory
This lecture gives a Matlab example of dynamic mode decomposition with control (DMDc) for full-state system identification.
See More
Autonomous Navigation, Part 3: Understanding SLAM Using Pose Graph Optimizat...
16 min
Beginner
Video
Theory
This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous localization and mapping (SLAM) problem in autonomous navigation.
We’ll...
See More
TCLab: An Inexpensive Experimental Platform for Students to Learn Feedback
5 min
Beginner
Video
Demonstration
The temperature control lab (TCLab) reinforces process feedback control with real data. The TCLab hardware consists of an Arduino® shield that fits onto a standard Arduino Leonardo...
See More
Control Bootcamp: LQG Example in Matlab
13 min
Beginner
Video
Theory
This video combines the LQR and Kalman filter in Matlab on the example of an inverted pendulum on a cart. We stabilize the full nonlinear system with a measurement of a single variable (the...
See More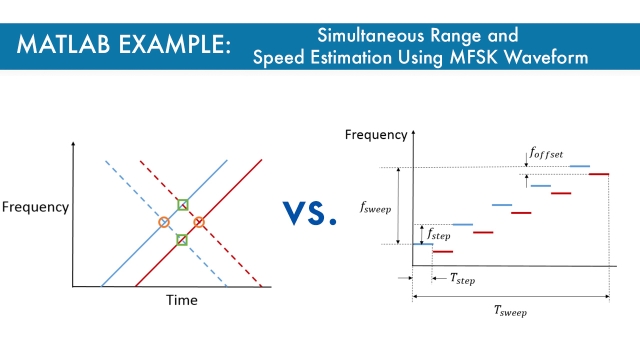
Simultaneous Range and Speed Estimation Using MFSK Waveform
Intermediate
Example
Application
This MATLAB example compares triangle sweep frequency-modulated continuous (FMCW) and multiple frequency-shift keying (MFSK) waveforms used for simultaneous range and speed estimation for...
See More
Control Systems in Practice, Part 5: A Better Way to Think About a Notch Fil...
13 min
Beginner
Video
Theory
This video describes an intuitive way to approach notch filter design by thinking about the problem as an inverted, lightly damped, second-order low-pass filter. Then, two additional poles...
See More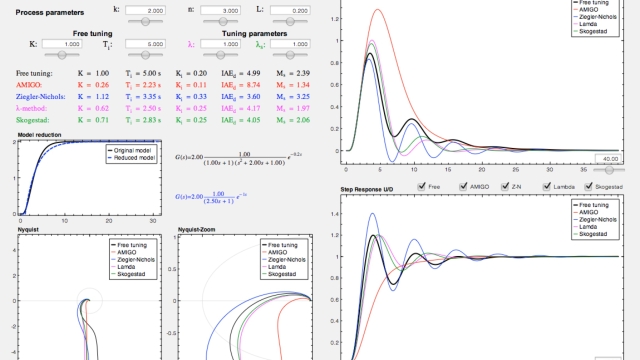
Interactive Tool about PID tuning rules
Intermediate
App
Application
Hundreds of PID design methods are available in literature. Many of them are very similar and sometimes it is not straightforward to understand their purposes. This interactive software tool...
See More")
Robotic Car - How to read Gyro Datasheets (Part 1)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this first part I go through the mechanical characteristics of a MEMS gyro and...
See More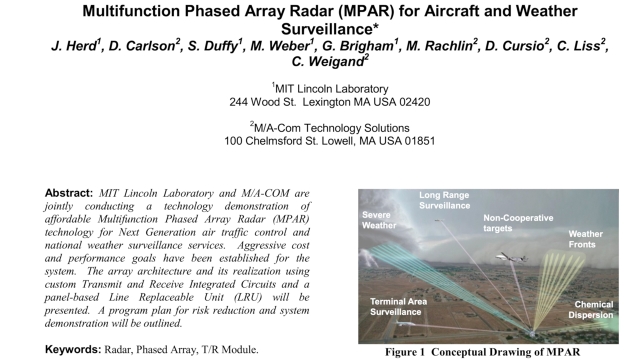
Multifunction Phased Array Radar (MPAR) for Aircraft and Weather Surveillanc...
Intermediate
Peer Reviewed Paper
Application
MIT Lincoln Laboratory and M/A-COM are jointly conducting a technology demonstration of affordable Multifunction Phased Array Radar (MPAR) technology for Next Generation air traffic control...
See More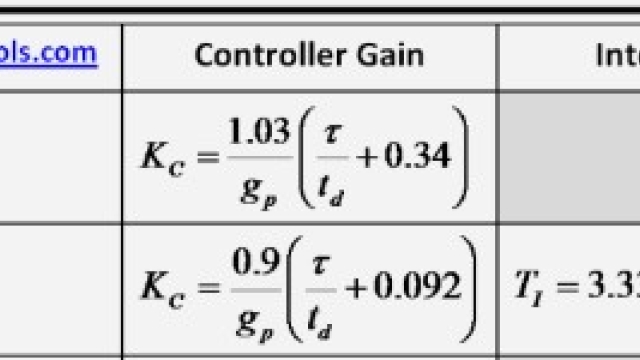
Cohen-Coon Tuning
15 min
Intermediate
Article / Blog
Application
A procedure and commentary on this tuning approach that includes deadtime.
See More
Control Valve Problems
20 min
Intermediate
Article / Blog
Application
Control valve problems can severely affect control loop performance and, unless eliminated, they can make controller tuning a challenging (sometimes impossible) task. Some problems are quite...
See More
Autodesk Tinkercad
Beginner
App
Application
Tinkercad is a free, easy-to-use web app that equips the next generation of designers and engineers with the foundational skills for innovation: 3D design, electronics, and coding!
See More
System Identification: Sparse Nonlinear Models with Control
8 min
Beginner
Video
Theory
This lecture explores an extension of the sparse identification of nonlinear dynamics (SINDy) algorithm to include inputs and control. The resulting SINDY with control (SINDYc) can be used...
See More
DSP Related
Beginner
Article / Blog
Application
Website with a lot of good content for any DSP scientists, researchers, and developers.
See More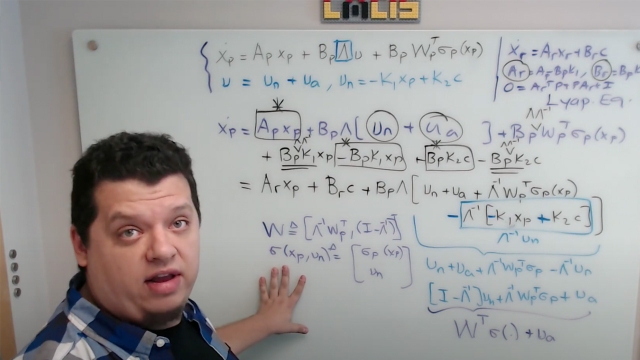
Model Reference Adaptive Control Fundamentals (Dr. Tansel Yucelen)
91 min
Beginner
Video
Theory
Forum on Robotics & Control Engineering (FoRCE, http://force.eng.usf.edu/) Seminar Series: "Model Reference Adaptive Control Fundamentals" (Dr. Tansel Yucelen)
See More
Systems Engineering, Part 5: Some Benefits of Model-Based Systems Engineerin...
12 min
Beginner
Video
Theory
Learn how model-based systems engineering (MBSE) can help you cut through the chaos of early systems development and get you from definition to execution more seamlessly.
You’ll hear the...
See More
MATLAB Documentation page: idLinear mapping object
Intermediate
Article / Blog
Application
This is the Mathworks documentation page for the idLinear mapping object.
See More
Wind Tunnel Corrections and Data Reduction
171 min
Advanced
Video
Theory
This is the second of our 3 part series on wind tunnel testing. In this video, we discuss 11 different corrections and data reduction processes that are applied to raw wind tunnel data to...
See More
Introduction to Linear Quadratic Regulator (LQR) Control
96 min
Beginner
Video
Theory
In this video we introduce the linear quadratic regulator (LQR) controller. We show that an LQR controller is a full state feedback controller where the gain matrix K is computed by solving...
See More
3D Kinematics, Free Falling, Reference Frames
53 min
Intermediate
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
What are Transfer Functions? | Control Systems in Practice
10 min
Beginner
Video
Theory
This video introduces transfer functions - a compact way of representing the relationship between the input into a system and its output. It covers why transfer functions are so popular and...
See More
Model Identification and Adaptive Control - From Windsurfing to Telecommunic...
Beginner
Book
Theory
This book is based on a workshop entitled: "Model Identification and Adaptive Control: From Windsurfing to Telecommunications" held in Sydney, Australia, on December 16, 2000. The workshop...
See More
Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields...
Beginner
Book
Theory
From the reviews: "This book is concerned with the application of methods from dynamical systems and bifurcation theories to the study of nonlinear oscillations. Chapter 1 provides a review...
See More
Control Bootcamp: Limitations on Robustness
9 min
Beginner
Video
Theory
This video describes some of the fundamental limitations of robustness, including time delays and right-half plane zeros.
See More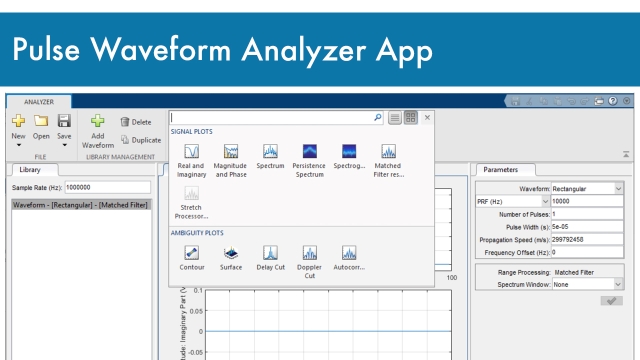
Pulse Waveform Analyzer App
Intermediate
App
Application
The Pulse Waveform Analyzer app lets you explore the properties of signals commonly used in radar. You can display 2-D and 3-D plots that let you visualize waveform time series and spectra.
... See More