

Filters
Type
Experience
Scope
944 items

Nyquist Stability Criterion, Part 2
18 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion part 2. This video steps through the how to sketch a Nyquist plot by hand, what to do if there are open loop pools on the imaginary axis...
See More
Understanding the Z-Transform
20 min
Beginner
Video
Theory
This intuitive introduction shows the mathematics behind the Z-transform and compares it to its similar cousin, the discrete-time Fourier transform. Mathematically, the Z-transform is...
See More
RADAR Engineering
200 min
Intermediate
Course
Theory
Radar technology is used widely today. The principles involved are very fundamental and every engineering student studies them at least once. This playlist covers Radar Engineering for an EE...
See More
Advances in Feedforward Control for Measurable Disturbances (slides)
Intermediate
Presentation
Theory
These slides present several contributions to improve the feedforward control approaches when inversion problem arise: the ideal compensator may not be realizable due to negative delay...
See More
Interactive Tools for Control Purposes
Intermediate
App
Theory
This resource provides different links to Interactive Tools that can be used for control education. Interactive Tools are very powerful educational resources as support to learning and...
See More
Vibrational Control in Insect Flight
7 min
Intermediate
Video
Application
Abstract: It is generally accepted among biology and engineering communities that insects are unstable at hover. However, existing approaches that rely on direct averaging do not fully...
See More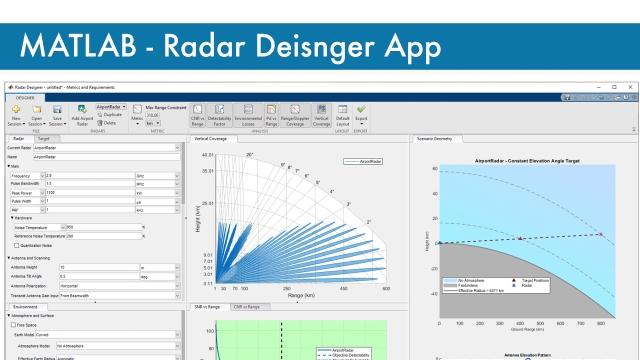
Matlab Radar Designer App
Intermediate
App
Application
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development. Using...
See More
MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More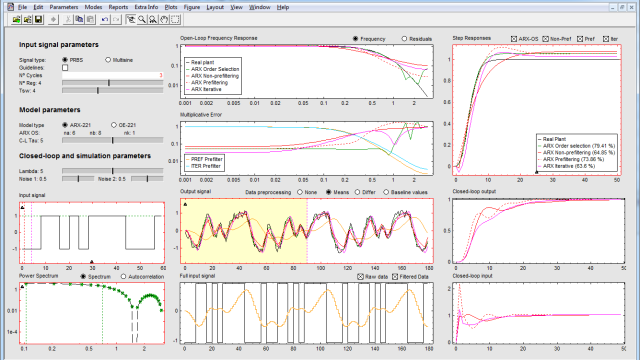
ITCRI: An Interactive Software Tool for Control-Relevant Identification
Intermediate
App
Application
The Interactive Tool for Control Relevant Identification (ITCRI) comprehensively captures the control-relevant identification process, from input design to closed-loop control, depicting...
See More
Guaranteed Margins for LQR Regulators
10 min
Intermediate
Peer Reviewed Paper
Theory
John Doyle's famous paper! He presents a counterexample that shows that are no guaranteed margins for LQG systems.
See More
What Is Fuzzy Logic | Fuzzy Logic Part 1
16 min
Beginner
Video
Theory
This video introduces fuzzy logic and explains how you can use it to design a fuzzy inference system (FIS), which is a powerful way to use human experience to design complex systems...
See More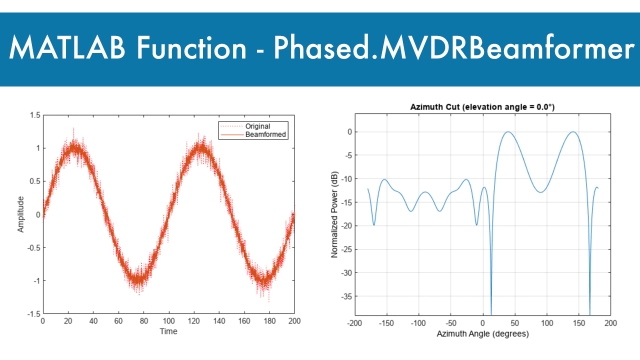
MATLAB Function: phased.MVDRBeamformer
Intermediate
Article / Blog
Application
The phased.MVDRBeamformer System object™ implements a narrowband minimum-variance distortionless-response (MVDR) beamformer. The MVDR beamformer is also called the Capon beamformer. An MVDR...
See More
Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More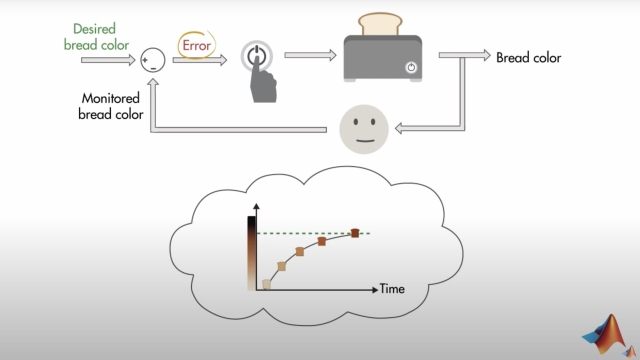
Understanding Control Systems: Feedback Control Systems
6 min
Beginner
Video
Theory
This video provides introductory examples to learn about the basics of feedback control (closed-loop control) systems.
Learn how feedback control is used to automate processes and discover...
See More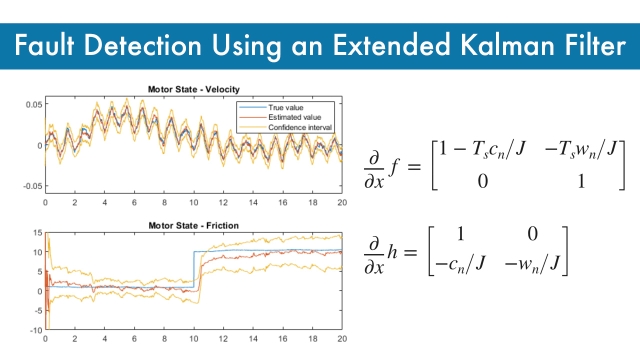
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More
Why Choose Model-Based Reinforcement Learning?
15 min
Intermediate
Video
Theory
What is the difference between model-free and model-based reinforcement learning? Explore the differences and results as the learning models are applied to balancing a cart/pole system as an...
See More
MIMO Radar: TI Application Report
Intermediate
Article / Blog
Theory
MIMO radar is a key technology in improving the angle resolution (spatial resolution) of mmwave-radars. This article introduces the basic principles of the MIMO-radar and the different...
See More
The Institute for Systems Theory and Automatic Control MATLAB Apps
Intermediate
App
Theory
The Institute for Systems Theory and Automatic Control offers 5 Matlab Apps on the topics of the Nyquist Criterion, Robustness and Stability, Loopshaping, Controllability and Observability...
See More
Nyquist Stability Criterion, Part 1
16 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion. This video steps through the importance of the criterion, how to interpret the Nyquist plot graphically, and why it is the way it is....
See More
Creating Discrete-Time Models
Intermediate
Example
Theory
This MATLAB example shows how to create discrete-time linear models using the tf, zpk, ss, and frd commands.
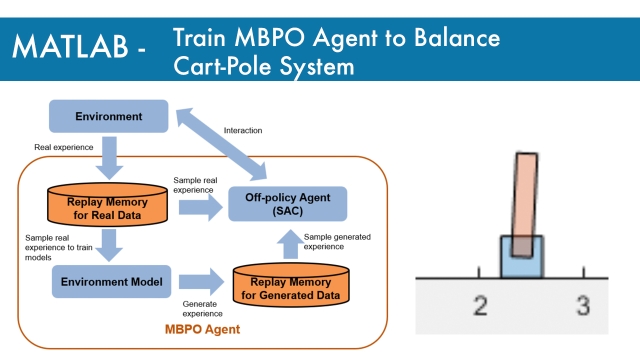
MATLAB Example: Train MBPO Agent to Balance Cart-Pole System
Intermediate
Example
Demonstration
This example shows how to train a model-based policy optimization (MBPO) agent to balance a cart-pole system modeled in MATLAB. For more information on MBPO agents, see Model-Based Policy...
See More
Intro to Data Science: The Nature of Data
12 min
Beginner
Video
Theory
This lecture discusses the types of data you might encounter, and how it determines which techniques to use.
See More
A real control system - how to start designing
26 min
Beginner
Video
Application
Let’s design a control system the way you might approach it in a real situation rather than an academic one. In this video, I step through a control problem and show how control theory is...
See More
Drone Simulation and Control, Part 1: Setting Up the Control Problem
14 min
Beginner
Video
Theory
Quadcopters and other styles of drones are extremely popular, partly because they have sophisticated programmed control systems that allow them to be stable and fly autonomously with very...
See More
Control Systems in Practice, Part 4: Why Time Delay Matters
15 min
Beginner
Video
Theory
Time delays exist in two varieties: signal distorting delays, like phase lag, in which each frequency is delayed by a different amount of time, resulting in a distorted signal shape; and non...
See More