

Filters
Type
Experience
Scope
944 items

Peter Ponders PID - Tank Level Control
20 min
Beginner
Video
Theory

Machine Learning Goals
7 min
Beginner
Video
Theory
This lecture discusses the high-level goals of machine learning, and what we want out of our models. Goals include speed and accuracy, along with interpretability, generalizability...
See More
The Inverse Laplace Transform
48 min
Beginner
Video
Theory
In this video we show how to perform the inverse Laplace transform on a signal in the Laplace domain to obtain its equivalent representation in the time doma...
See More")
Introduction to the Fourier Transform (Part 1)
13 min
Beginner
Video
Theory
This video is an introduction to the Fourier Transform. I try to give a little bit of background into what the transform does and then I go step by step through explaining the Inverse...
See More
Control Systems Lectures - Transfer Functions
11 min
Beginner
Video
Theory
This lecture describes transfer functions and how they are used to simplify modeling of dynamic systems.
See More
Understanding and Sketching Individual Bode Plot Components
148 min
Beginner
Video
Theory
In this video we illustrate how 7 types of simple transfer functions contribute to a bode plot. We refer to these as ‘components’ and will cover the followi...
See More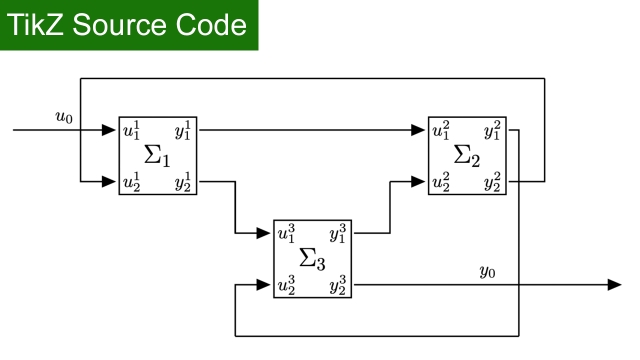
TikZ source Code: An interconnection of MIMO subsystems
Beginner
Source Code
Application
TikZ source Code: An interconnection of MIMO subsystems
See More
Lecture 11: Transient Response and Numerical Problems
30 min
Beginner
Video
Theory

Derivation of the 2D Wave Equation
27 min
Beginner
Video
Theory
In this video we derive the 2D wave equation. This partial differential equation governs the motion of waves in a plane and is applicable for thin vibrating...
See More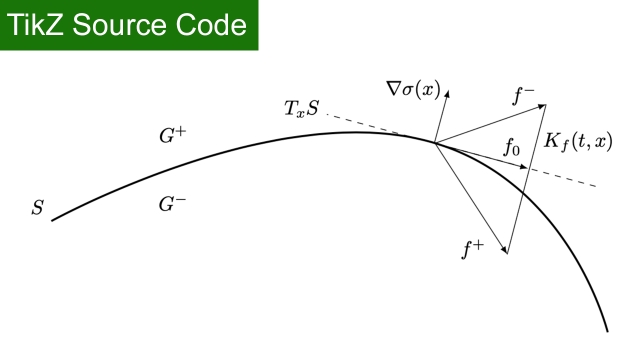
TikZ source Code: Switching Smooth Filippov
Beginner
Source Code
Application
TikZ source Code: Switching Smooth Filippov
See More
Lecture 21: Introduction to Frequency Response
57 min
Beginner
Video
Theory

Frequency domain – tutorial 8: frequency spectra
9 min
Beginner
Video
Theory
In this video, we learn about frequency spectra which can be divided into two parts: phase and magnitude spectrum. Some examples will be provided to practice...
See More
Lecture 23: Bode plots
48 min
Beginner
Video
Theory
Robust Principal Component Analysis (RPCA)
22 min
Intermediate
Video
Theory
Robust statistics is essential for handling data with corruption or missing entries. This robust variant of principal component analysis (PCA) is now a workhorse algorithm in several fields...
See More
Frequency domain – tutorial 11: equalization
11 min
Beginner
Video
Theory
In this video, we learn about equalization technique which is used in communication systems to compensate for the destructive effect of the channel between t...
See More
Bode Plots by Hand: Real Poles or Zeros
13 min
Beginner
Video
Theory
This is a continuation of the Control Systems Lectures. This video describes the benefit of being able to approximate a Bode plot by hand and explains what a Bode plot looks like for a...
See More
Designing a Lead Compensator with Bode Plot
14 min
Beginner
Video
Theory
This video walks through a phase lead compensator example using the Bode Plot method.
See More
Process Control Introduction
14 min
Beginner
Video
Theory
An overview on state variables, inputs (manipulated and disturbance variables), outputs (measured state variables), and an example on the balance equations w...
See More
Apollo's Flight Computer: Epitome of Engineering
81 min
Beginner
Video
Demonstration
The Apollo missions' success can be vastly accredited to the success of building a robust, one-of-a-kind flight computer for its guidance, navigation and control. Follow this video to...
See More