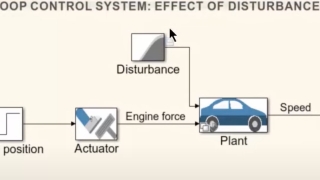
This video provides a demonstration using a car to show how you can simulate open- and closed-loop systems in Simulink®.
First, you will learn how to model and tune open-loop systems. The goal of the demonstration is to maintain the speed of a car. Then, you’ll explore the behavior of the open-loop system in the presence of a disturbance. To illustrate disturbance rejection, the video shows how to model and simulate a feedback control system . You will gain insight into how feedback control compensates for disturbance. You’ll investigate signals such as error (in this example, the error is the difference between the measured and desired output), actuating signal (here, the actuating signal is the pedal’s position) and system output (in this example, the output is speed).