
A proportional–integral–derivative controller (PID controller or three-term controller) is a control loop mechanism employing feedback that is widely used in industrial control systems and a variety of other applications requiring continuously modulated control. A PID controller continuously calculates an error value, e(t), as the difference between a desired setpoint (SP) and a measured process variable (PV) and applies a correction based on proportional, integral, and derivative terms (denoted P, I, and D respectively), hence the name.
Topic
Proportional-Integral-Derivative (PID) Controller
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
56 items

Understanding PID Control, Part 1: What is PID Control?
11 min
Beginner
Video
Theory
Chances are you’ve interacted with something that uses a form of this control law, even if you weren’t aware of it. That’s why it is worth learning a bit more about what this control law is...
See More
Understanding PID Control, Part 5: Three Ways to Build a Model
13 min
Beginner
Video
Theory
Tuning a PID controller requires that you have a representation of the system you’re trying to control. This could be the physical hardware or a mathematical representation of that hardware...
See More
Understanding PID Control, Part 7: Important PID Concepts
12 min
Beginner
Video
Theory
Now that you ’ve gotten an overview of PID tuning techniques, this video moves on to discussing two important concepts in PID control: cascaded loops and discrete systems. Both concepts are...
See More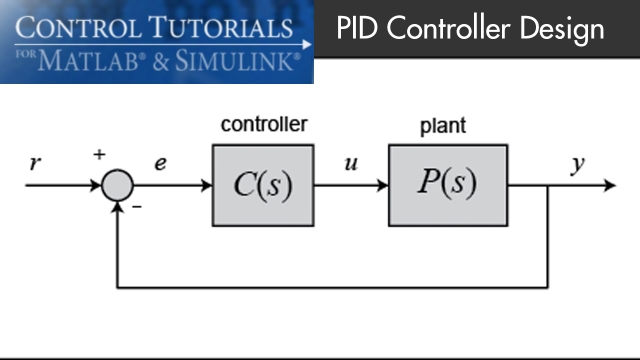
Introduction: PID Controller Design
30 min
Beginner
Article / Blog
Application
In this tutorial we will introduce a simple, yet versatile, feedback compensator structure: the Proportional-Integral-Derivative (PID) controller. The PID controller is widely employed...
See More
Understanding PID Control, Part 6: Manual and Automatic Tuning Methods
13 min
Beginner
Video
Theory
The previous video showed three different approaches to developing a mathematical model of your physical system. Now that we have this model, we can use it to tune a PID controller that will...
See More
Understanding PID Control, Part 4: A PID Tuning Guide
12 min
Beginner
Video
Theory
It can be difficult to navigate all the resources that promise to explain the secrets of PID tuning. Some proclaim that PID tuning is an art that requires finesse and experience, while...
See More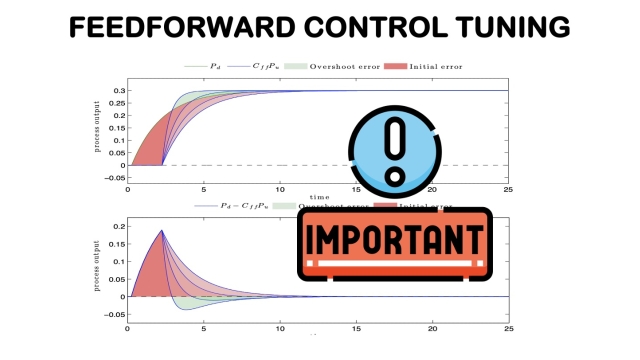
Advances in feedforward control for measurable disturbances
35 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More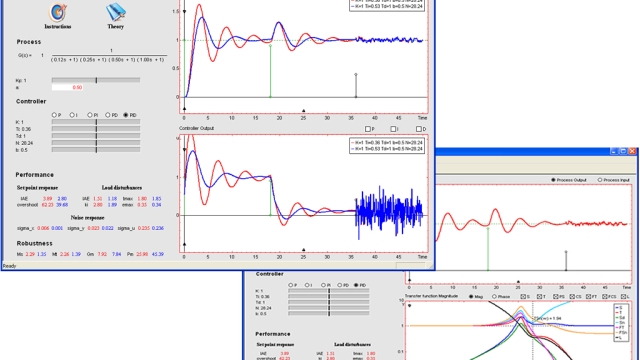
Interactive Tool for PID understanding
Intermediate
App
Application
The module PID Basics is designed to explore the properties of a simple feedback loop by showing the time and frequency responses of a closed-loop system and demonstrating how these...
See More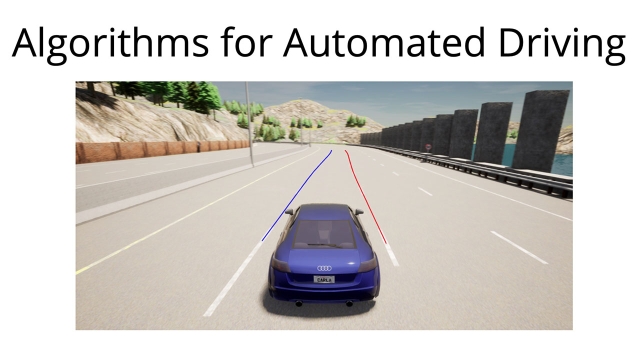
Algorithms for Automated Driving
Intermediate
Project
Application
Each chapter of this (mini-)book guides you in programming one important software component for automated driving. Currently, this book contains two chapters: Lane Detection, and Control...
See More
TCLab PID Control
60 min
Intermediate
Article / Blog
Application
Implement a PID controller on the Temperature Control Lab hardware to drive the temperature from room temperature to 60 degrees C. This resource lets you attempt the design yourself first...
See More
Improving the Beginner's PID - Introduction
30 min
Beginner
Article / Blog
Application
In conjunction with the release of the new Arduino PID Library Brett has released this series of posts that explain his PID code. He start's with what he call's “The Beginner’s PID.” He...
See More
Advances in feedforward control for measurable disturbances (in Spanish)
60 min
Intermediate
Video
Theory
The efficient compensation of load disturbances is one of the most important tasks in any control system. Most industrial processes are affected by disturbances and only feedback is commonly...
See More
Advances in Feedforward Control for Measurable Disturbances (slides)
Intermediate
Presentation
Theory
These slides present several contributions to improve the feedforward control approaches when inversion problem arise: the ideal compensator may not be realizable due to negative delay...
See More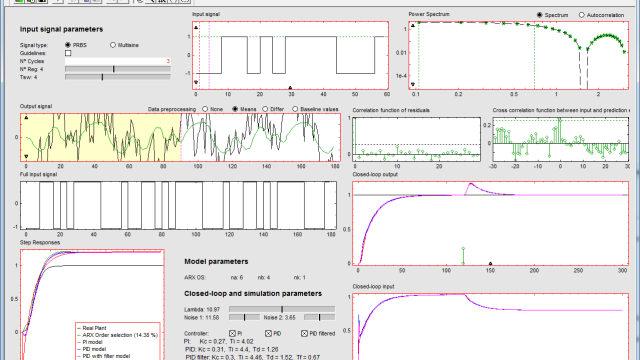
i-pIDtune: An interactive tool for integrated system identification and PID ...
Intermediate
App
Application
i-pIDtune is an interactive software tool that integrates system identification and PID controller design. The tool supports experimental design and execution under plant-friendly conditions...
See More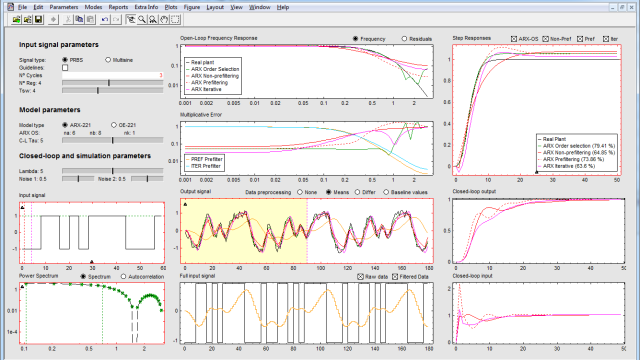
ITCRI: An Interactive Software Tool for Control-Relevant Identification
Intermediate
App
Application
The Interactive Tool for Control Relevant Identification (ITCRI) comprehensively captures the control-relevant identification process, from input design to closed-loop control, depicting...
See More
Regulatory PID (Polish)
18 min
Beginner
Video
Theory
W tym odcinku, opisze wam podstawy działania regulatorów PID.
See More
First Order Plus Dead Time Tuning App for PI Controllers
Intermediate
App
Application
The FOPTD_PI Tool is a Matlab-Interactive tuning tool of PI controllers for First Order PlusTime Delay processes. It can be used to teach basic control concepts based on a set of PI tuning...
See More
Quanser QUBE-Servo 2: Low-cost Teaching Platform for Controls
Beginner
Hardware
Application
The Quanser QUBE-Servo 2 is a fully integrated, modular servomotor lab experiment designed for teaching mechatronics and control concepts at the undergraduate level. Ideal for teaching speed...
See More
Control Design Onramp with Simulink
60 min
Beginner
Software
Demonstration
Learn the basics of feedback control design in Simulink®. Adjust the gains of a PID controller to change the dynamics of a physical system and get the closed-loop system behavior that you...
See More
Experimental evaluation of feedforward tuning rules
Advanced
Peer Reviewed Paper
Demonstration
This paper presents a practical comparison for some of the most relevant tuning rules for feedforward compensators that have been published in the recent years. The work is focused on the...
See More
Feedforward tuning rules for measurable disturbances with PID control: a tut...
Intermediate
Peer Reviewed Paper
Theory
Feedforward control can be considered as the most well-known control approach to deal with measurable disturbances. It started to be used almost 100 years ago, and since then it is being...
See More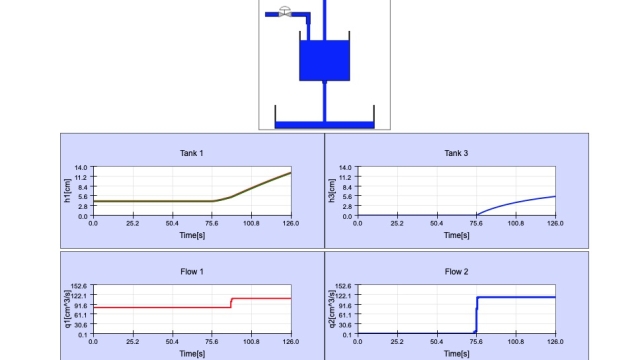
Virtual Lab for a Two-tanks system
Beginner
Virtual Lab
Application
This is a virtual lab for a two-tank system that can be used for modelling and control learing/teaching purposes. Open-loop tests and closed-loop simulatons based on PI control or PI plus...
See More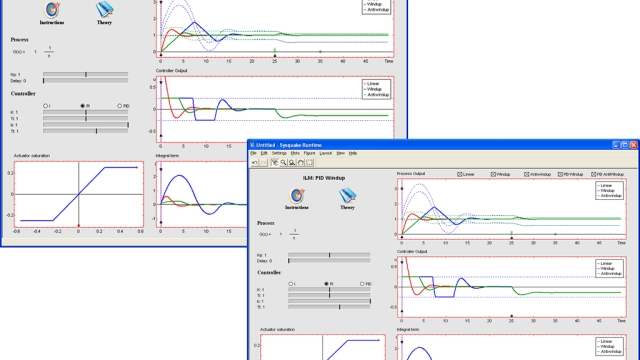
Interactive Tool about control signal saturation (windup) with PID control
Intermediate
App
Application
The purpose of this module is to give a familiarity with the phenomenon of integral windup and a method for avoiding it. The module shows process outputs and control signals for unlimited...
See More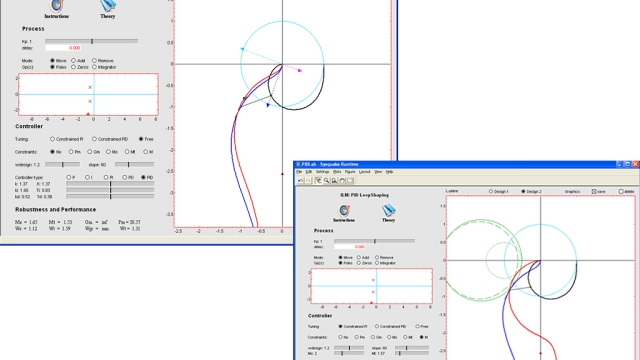
Interactive Tool for Loop Shaping understanding based on PID control
Intermediate
App
Application
Loop shaping is a design method where it is attempted to choose a controller such that the loop transfer function obtains the desired shape. In this module the loop transfer function is...
See More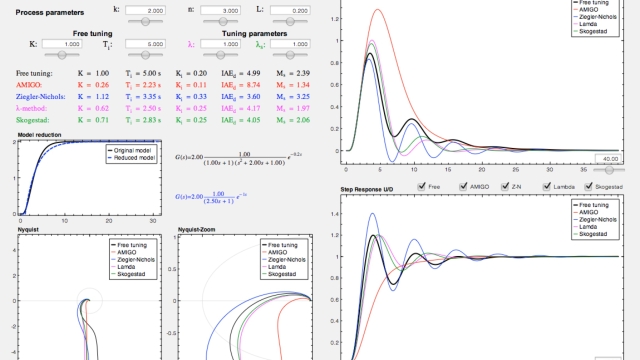
Interactive Tool about PID tuning rules
Intermediate
App
Application
Hundreds of PID design methods are available in literature. Many of them are very similar and sometimes it is not straightforward to understand their purposes. This interactive software tool...
See More