
A proportional–integral–derivative controller (PID controller or three-term controller) is a control loop mechanism employing feedback that is widely used in industrial control systems and a variety of other applications requiring continuously modulated control. A PID controller continuously calculates an error value, e(t), as the difference between a desired setpoint (SP) and a measured process variable (PV) and applies a correction based on proportional, integral, and derivative terms (denoted P, I, and D respectively), hence the name.
Topic
Proportional-Integral-Derivative (PID) Controller
This topic includes the following resources and journeys:
Filters
Type
Experience
Scope
56 items
Peter Ponders PID - Controlling non-integrating single pole system. Part 1 ...
10 min
Beginner
Video
Theory
Part 1 shows why P only control shouldn't be used because the set point or target is never reached.Part 2 shows why I only control shouldn't be used because ...
See More
Cascade Control Intro
8 min
Beginner
Video
Theory
How can we improve the disturbance rejection of our controllers using additional, relevant measurements? Tune in to find out!
See More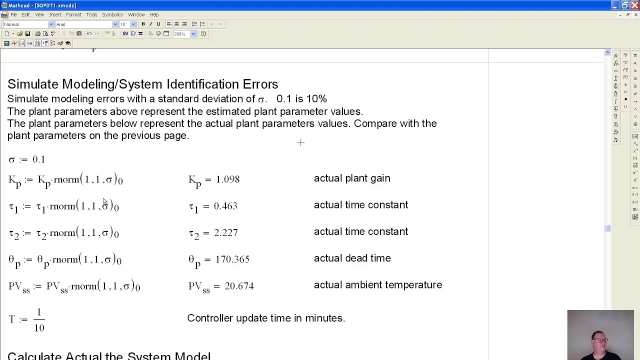
Peter Ponders PID. Second Order Plus Dead Time , SOPDT, Temperature Control,...
12 min
Beginner
Video
Theory
In this video I derive the equations for the controller gains and a low pass filter for a SOPDT system with a very long dead time To make the simulation mo...
See More
Designing a PID Controller Using the Ziegler-Nichols Method
33 min
Beginner
Video
Theory
In this video we discuss how to use the Ziegler-Nichols method to choose PID controller gains. In addition to discussing the method and providing a Matlab i...
See More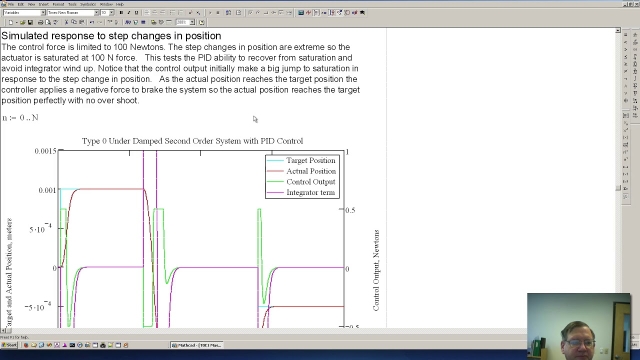
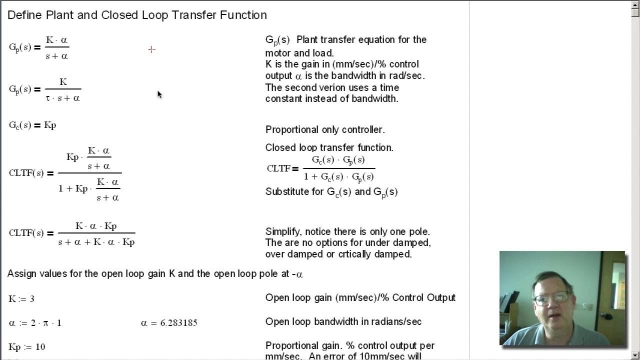
Peter Ponders PID - Controlling an Under Damp Mass and Spring System
24 min
Beginner
Video
Theory
Demonstrates:How to calculate the PID gains. The importance of the derivative gain. How to simulate the mass and spring systemControl limitations based on s...
See More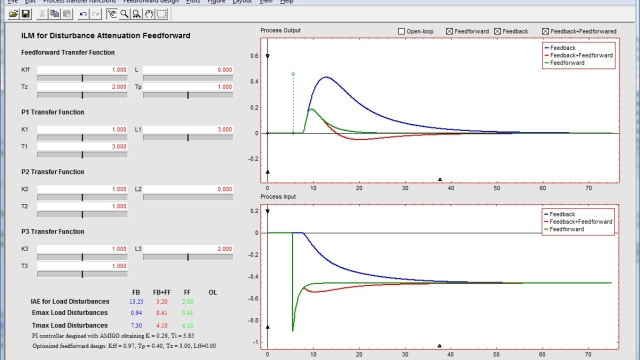
An interactive feedforward tool for FeedForward Control
Beginner
App
Application
This interactive software tool is focused on basic and advanced concepts of feedforward control.
See More