

TinyEKF: Lightweight C/C++ Extended Kalman Filter with Python for prototypin...
Intermediate
Software
Application
TinyEKF is a simple C/C++ implementation of the Extended Kalman Filter that is general enough to use on different projects. In order to make it practical for running on Arduino, STM32, and...
See More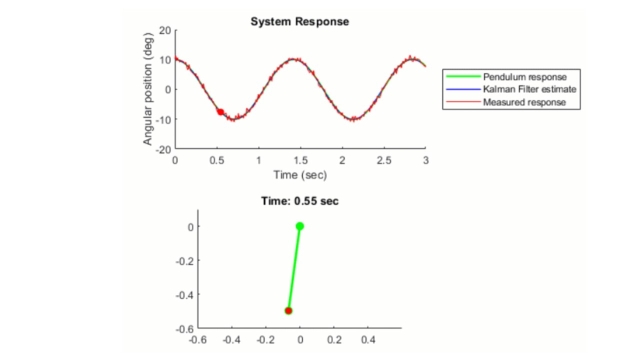
Kalman Filter Virtual Lab
Intermediate
Virtual Lab
Application
The Kalman Filter virtual laboratory contains interactive exercises that let you study linear and extended Kalman filter design for state estimation of a simple pendulum system. The virtual...
See More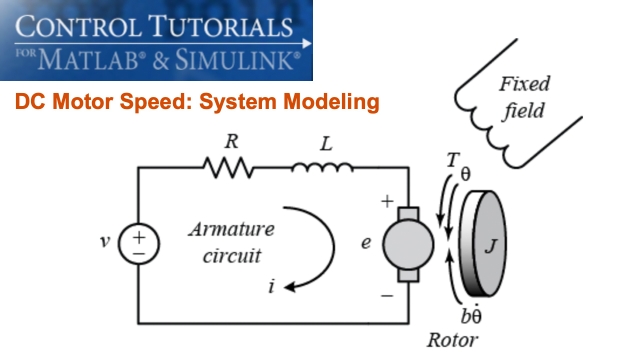
DC Motor Speed: System Modeling
Beginner
Project
Theory
This examples walks through modeling a simple DC motor in MATLAB.
See More
Virtual Labs for control education
Intermediate
Virtual Lab
Theory
This resource provides different links to virtual and remote labs that can be used for control education. Virtual and remote labs are very powerful tools for learning and teaching, that...
See More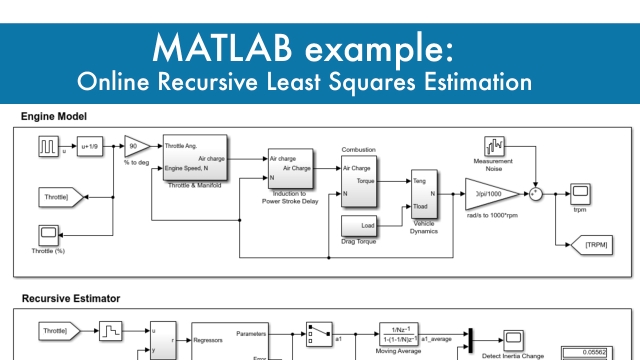
MATLAB Example: Online Recursive Least Squares Estimation
Intermediate
Project
Demonstration
This example shows how to implement an online recursive least squares estimator. You estimate a nonlinear model of an internal combustion engine and use recursive least squares to detect...
See More
MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More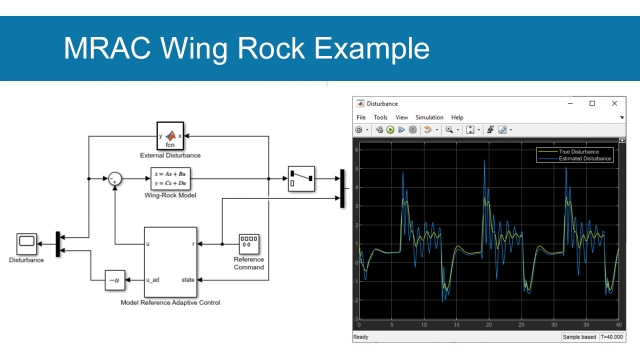
Model Reference Adaptive Control of Aircraft Undergoing Wing Rock
Intermediate
Project
Theory
This example shows how to control roll and roll rate of a delta wing aircraft undergoing wing rock. For this example, the system model is unknown. Therefore, you use model reference adaptive...
See More
MPCTools: Nonlinear Model Predictive Control Tools for CasADi (Python Interf...
Intermediate
Software
Application
This Python package is a collection of model predictive control tools that build on CasADi by providing a simpler interface. Along with the python package, there are a bunch of example files...
See More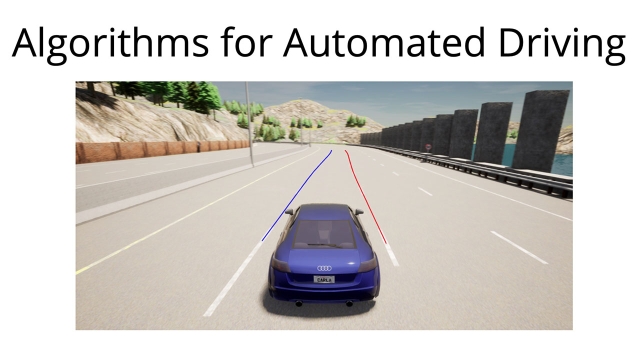
Algorithms for Automated Driving
Intermediate
Project
Application
Each chapter of this (mini-)book guides you in programming one important software component for automated driving. Currently, this book contains two chapters: Lane Detection, and Control...
See More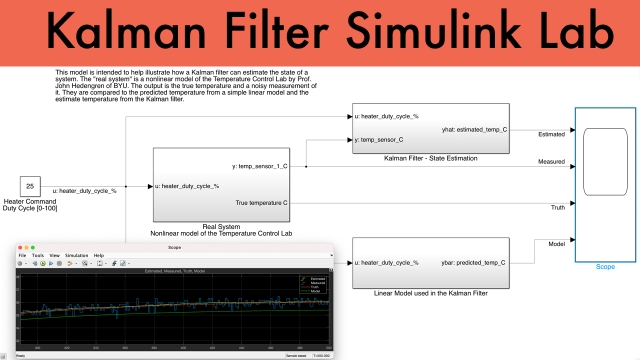
Kalman Filter Simulink 2022A example
Intermediate
Virtual Lab
Demonstration
This model is intended to help illustrate how a Kalman filter can estimate the state of a system. The "real system" is a nonlinear model of the Temperature Control Lab by Prof. John...
See More
MATLAB Function: ztrans
Intermediate
Software
Application
ztrans(f) finds the Z-Transform of f. By default, the independent variable is n and the transformation variable is z. If f does not contain n, ztrans uses symvar.
See More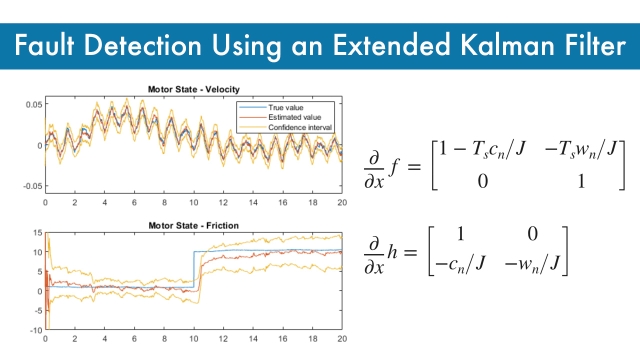
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More
Model predictive control python toolbox
Intermediate
Software
Application
do-mpc is a comprehensive open-source toolbox for robust model predictive control (MPC) and moving horizon estimation (MHE). do-mpc enables the efficient formulation and solution of control...
See More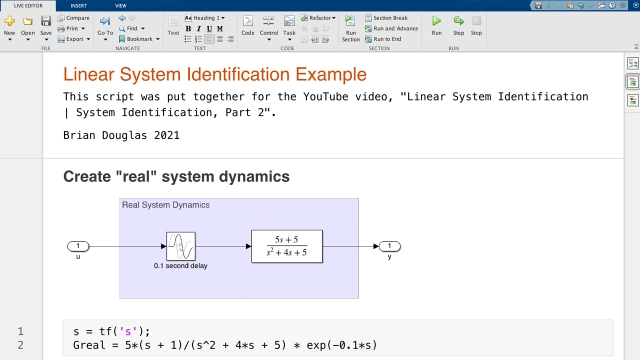
MATLAB Scripts for video "Linear System Identification | System Identificati...
Intermediate
Software
Demonstration
This Github repo contains the data files and MATLAB scripts that were used in the MATLAB Tech Talk video "Linear System Identification | System Identification, Part 2"
See More
Control Loop Foundation Batch and Continuous Processes - Interactive Source ...
Intermediate
Virtual Lab
Application
Control Loop Foundation contains workshops that allow the reader to get hands on experience through this web interface. Once a lab is selected, then you may access workshop directions and...
See More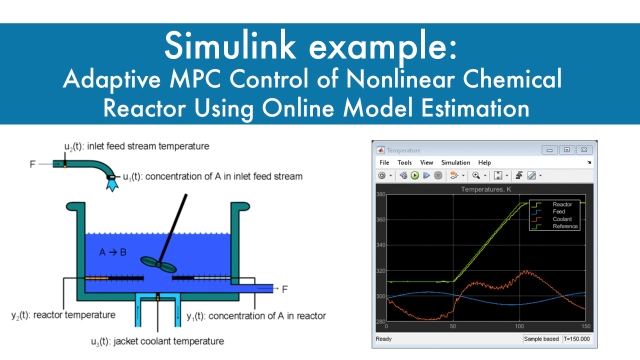
Simulink example: Adaptive MPC Control of Nonlinear Chemical Reactor Using O...
Intermediate
Project
Application
This example shows how to use an Adaptive MPC controller to control a nonlinear continuous stirred tank reactor (CSTR) as it transitions from low conversion rate to high conversion rate.
A...
See More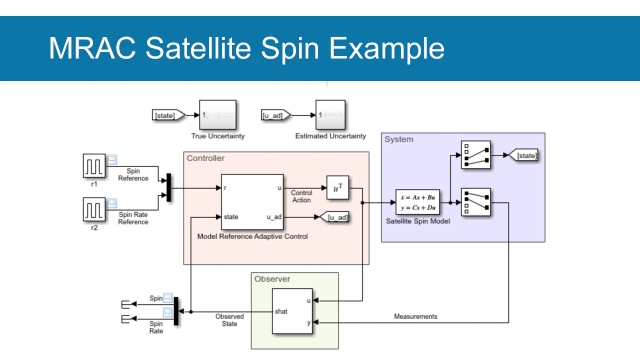
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More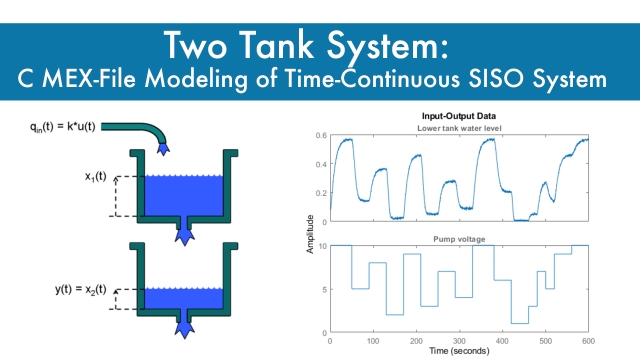
Two Tank System: C MEX-File Modeling of Time-Continuous SISO System
Intermediate
Software
Demonstration
This MATLAB example shows how to perform IDNLGREY modeling based on C MEX model files. It uses a simple system where nonlinear state space modeling really pays off.
See More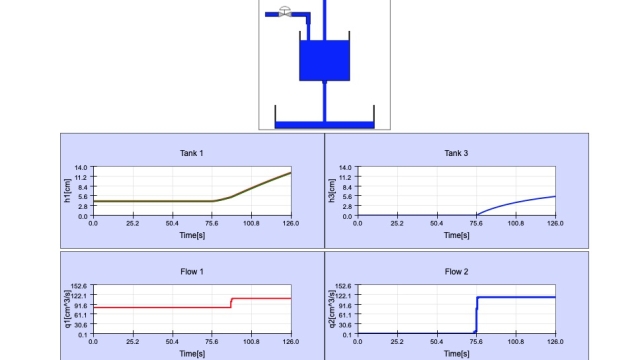
Virtual Lab for a Two-tanks system
Beginner
Virtual Lab
Application
This is a virtual lab for a two-tank system that can be used for modelling and control learing/teaching purposes. Open-loop tests and closed-loop simulatons based on PI control or PI plus...
See More
Control Design Onramp with Simulink
60 min
Beginner
Software
Demonstration
Learn the basics of feedback control design in Simulink®. Adjust the gains of a PID controller to change the dynamics of a physical system and get the closed-loop system behavior that you...
See More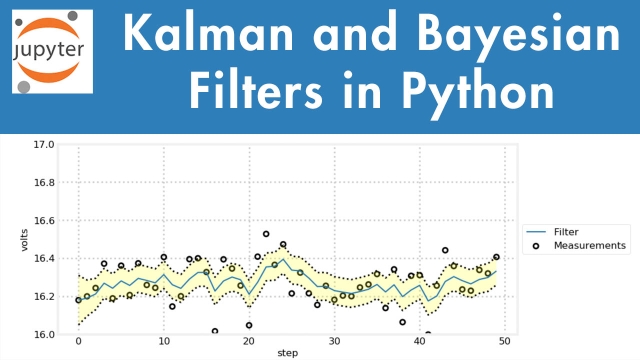
Kalman and Bayesian Filters in Python
Beginner
Software
Application
Introductory text for Kalman and Bayesian filters. All code is written in Python, and the book itself is written using Juptyer Notebook so that you can run and modify the code in your...
See More
Data based modeling of nonlinear dynamic systems using System Identification...
Intermediate
Software
Demonstration
Using an engine throttle valve modeling example, this demo shares some perspectives on creation of nonlinear models of dynamic systems from the measurements of its input and outputs. It...
See More
MATLAB scripts for "Nonlinear System Identification | System Identification,...
Intermediate
Software
Demonstration
This Github repo contains the data files and MATLAB scripts that were used in "Nonlinear System Identification | System Identification, Part 3".
See More
Jupyter Notebook: Code used to generate vibrational control of inverted pend...
Intermediate
Software
Demonstration
Jupyter Notebook: Code used to generate vibrational control of inverted pendulum figures
See More
Python Control Systems Library
Intermediate
Software
Application
The python-control package is a set of python classes and functions that implement common operations for the analysis and design of feedback control systems. The initial goal is to implement...
See More