Intermediate
Virtual Lab
Demonstration
Link to External Site
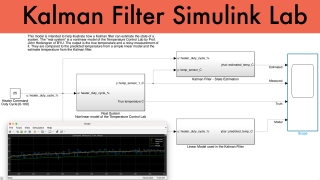
This model is intended to help illustrate how a Kalman filter can estimate the state of a system. The "real system" is a nonlinear model of the Temperature Control Lab by Prof. John Hedengren of BYU. The output is the true temperature and a noisy measurement of it. They are compared to the predicted temperature from a simple linear model and the estimate temperature from the Kalman filter.
Radioactivity
0