

Systems Engineering, Part 1: What Is Systems Engineering?
15 min
Beginner
Video
Theory
This video covers what systems engineering is and why it’s useful. We will present a broad overview of how systems engineering helps us develop complex projects that meet the program...
See More
How Simulations Work
30 min
Beginner
Article / Blog
Theory
This article sets out the critical aspects of building good simulations — that is, simulations that are accurate, easy to develop and analyze, and fast. The first sections deal with how a...
See More
Guaranteed Margins for LQR Regulators
10 min
Intermediate
Peer Reviewed Paper
Theory
John Doyle's famous paper! He presents a counterexample that shows that are no guaranteed margins for LQG systems.
See More
Introduction to System Identification
46 min
Beginner
Video
Theory
In this webinar, you will have a unique chance to learn about system identification from a world-renowned subject expert, Professor Lennart Ljung. Professor Ljung will explain the basic...
See More
Process Dynamics and Control Course
Beginner
Course
Theory
This course focuses on a complete start to finish process of physics-based modeling, data driven methods, and controller design. Although some knowledge of computer programming is required...
See More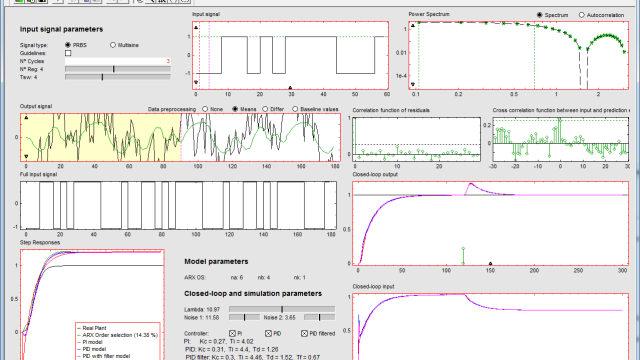
i-pIDtune: An interactive tool for integrated system identification and PID ...
Intermediate
App
Application
i-pIDtune is an interactive software tool that integrates system identification and PID controller design. The tool supports experimental design and execution under plant-friendly conditions...
See More
Understanding the Z-Transform
20 min
Beginner
Video
Theory
This intuitive introduction shows the mathematics behind the Z-transform and compares it to its similar cousin, the discrete-time Fourier transform. Mathematically, the Z-transform is...
See More
Road Sign Detection using Transfer Learning on RetinaNet
15 min
Intermediate
Article / Blog
Application
This blog outlines a number of open-source resources for transfer learning that are worthy of exploring, ands show the result of using transfer learning on RetinaNet to develop a road sign...
See More
Understanding Kalman Filters, Part 5: Nonlinear State Estimators
8 min
Beginner
Video
Theory
This video explains the basic concepts behind nonlinear state estimators, including extended Kalman filters, unscented Kalman filters, and particle filters.
A Kalman filter is only defined...
See More
Resonance in Nature and Bioinspired Squid Robots
18 min
Beginner
Video
Demonstration
Bioinspired robots combine the best of both biology and engineering. Using tools learned from nature, we can build squid-like and other squishy robots to improve current capabilities in...
See More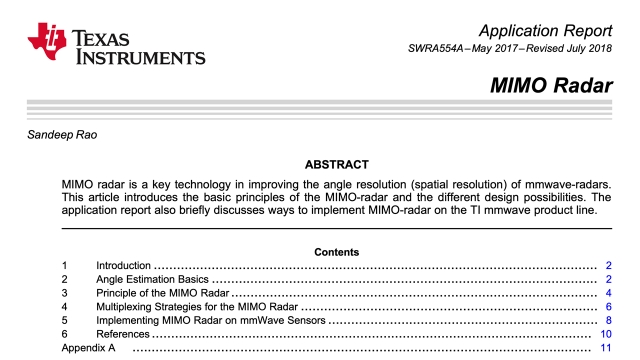
MIMO Radar: TI Application Report
Intermediate
Article / Blog
Theory
MIMO radar is a key technology in improving the angle resolution (spatial resolution) of mmwave-radars. This article introduces the basic principles of the MIMO-radar and the different...
See More
Nyquist Stability Criterion, Part 2
18 min
Beginner
Video
Theory
An explanation of the Nyquist Stability Criterion part 2. This video steps through the how to sketch a Nyquist plot by hand, what to do if there are open loop pools on the imaginary axis...
See More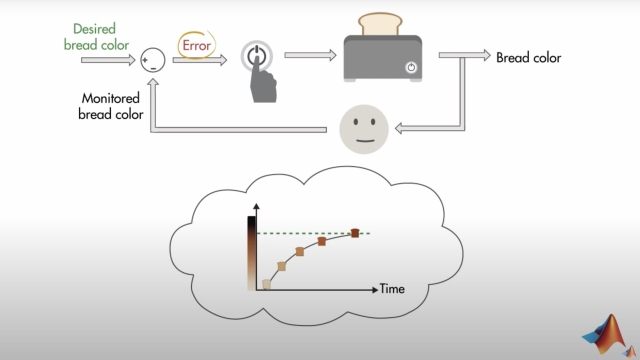
Understanding Control Systems: Feedback Control Systems
6 min
Beginner
Video
Theory
This video provides introductory examples to learn about the basics of feedback control (closed-loop control) systems.
Learn how feedback control is used to automate processes and discover...
See More
MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More
Systems modeling and representations (French)
Beginner
Course
Theory
Complete course on systems modeling. Includes examples, MATLAB code, and quizzes.
See More
RADAR Engineering
200 min
Intermediate
Course
Theory
Radar technology is used widely today. The principles involved are very fundamental and every engineering student studies them at least once. This playlist covers Radar Engineering for an EE...
See More
Advances in Feedforward Control for Measurable Disturbances (slides)
Intermediate
Presentation
Theory
These slides present several contributions to improve the feedforward control approaches when inversion problem arise: the ideal compensator may not be realizable due to negative delay...
See More
But what is the Fourier Transform? A visual introduction.
20 min
Beginner
Video
Theory
An animated introduction to the Fourier Transform.
See More
Vibrational Control in Insect Flight
7 min
Intermediate
Video
Application
Abstract: It is generally accepted among biology and engineering communities that insects are unstable at hover. However, existing approaches that rely on direct averaging do not fully...
See More
Matlab Radar Designer App
Intermediate
App
Application
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development. Using...
See More
Learning From Data
Beginner
Course
Theory
This is an introductory course in machine learning (ML) that covers the basic theory, algorithms, and applications. ML is a key technology in Big Data, and in many financial, medical...
See More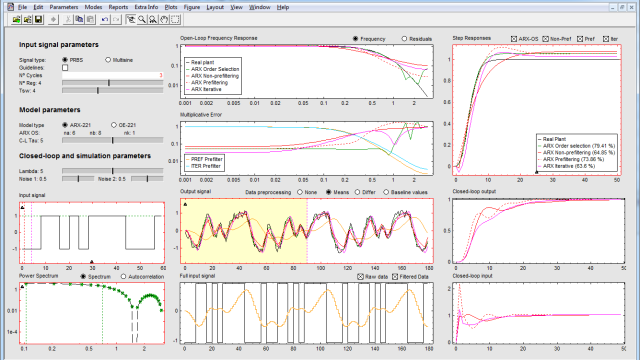
ITCRI: An Interactive Software Tool for Control-Relevant Identification
Intermediate
App
Application
The Interactive Tool for Control Relevant Identification (ITCRI) comprehensively captures the control-relevant identification process, from input design to closed-loop control, depicting...
See More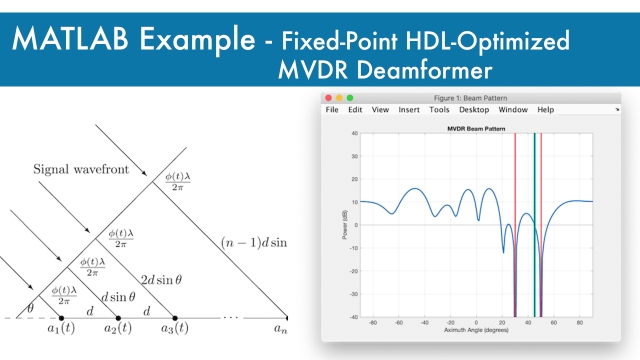
Fixed-Point HDL-Optimized Minimum-Variance Distortionless-Response (MVDR) Be...
Intermediate
Example
Application
This example shows how to implement a fixed-point HDL-optimized minimum-variance distortionless-response (MVDR) beamformer in MATLAB.
See More
Model predictive control python toolbox
Intermediate
Software
Application
do-mpc is a comprehensive open-source toolbox for robust model predictive control (MPC) and moving horizon estimation (MHE). do-mpc enables the efficient formulation and solution of control...
See More
Creating Discrete-Time Models
Intermediate
Example
Theory
This MATLAB example shows how to create discrete-time linear models using the tf, zpk, ss, and frd commands.