


System Identification: DMD Control Example
8 min
Intermediate
Video
Theory
This lecture gives a Matlab example of dynamic mode decomposition with control (DMDc) for full-state system identification.
See More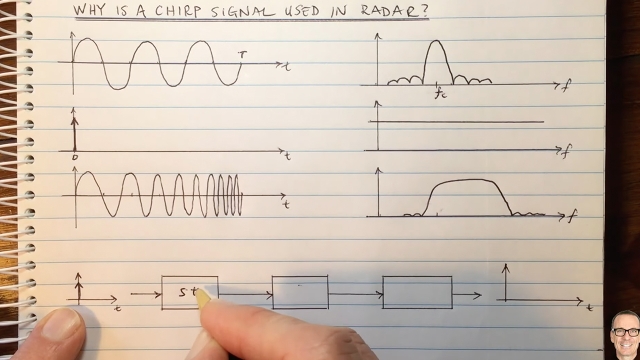
Why is a Chirp Signal used in Radar?
7 min
Beginner
Video
Theory
Gives an intuitive explanation of why the Chirp signal is a good compromise between an impulse waveform and a sinusoidal pulse waveform for radar.
See More
Robust Control, Part 3: Disk Margins for MIMO Systems
16 min
Beginner
Video
Theory
This video shows how margin can be used to assess the robustness of multi-input, multi-output systems. We’ll show how disk margin is a more complete way to represent margin for MIMO systems...
See More
Respect the Unstable
71 min
Beginner
Video
Theory
An understanding of fundamental limitations is an essential element in all engineering. Shannon's early results on channel capacity have always had center court in signal processing...
See More
A simple MEMS gyro model using MATLAB / Simulink
16 min
Beginner
Video
Theory
This video walks through how to model a simple MEMS gyroscope using MATLAB/Simulink. At the end I show you how to linearize this model to use in your linear control loop design and analysis.
See More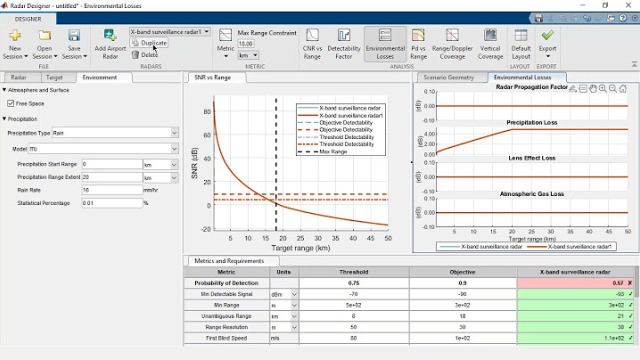
Radar Design with the Radar Designer App
5 min
Beginner
Video
Theory
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development.
See More
Control Systems in Practice, Part 5: A Better Way to Think About a Notch Fil...
13 min
Beginner
Video
Theory
This video describes an intuitive way to approach notch filter design by thinking about the problem as an inverted, lightly damped, second-order low-pass filter. Then, two additional poles...
See More
OIT System Design Laboratory (Japanese)
Beginner
Video
Demonstration
A collection of video lectures from OIT SDL.
See More")
Robotic Car - How to read Gyro Datasheets (Part 1)
14 min
Beginner
Video
Theory
Have you ever been lost trying to understand the information in a gyro datasheet? This video should help! In this first part I go through the mechanical characteristics of a MEMS gyro and...
See More
Control Bootcamp: Limitations on Robustness
9 min
Beginner
Video
Theory
This video describes some of the fundamental limitations of robustness, including time delays and right-half plane zeros.
See More
Why Padé Approximations Are Great! | Control Systems in Practice
Beginner
Video
Theory
Watch an introduction to Padé approximations. Learn what Padé approximations are and how to calculate them, why they are important, and when to use them—specifically in the context of time...
See More
System Identification: Sparse Nonlinear Models with Control
8 min
Beginner
Video
Theory
This lecture explores an extension of the sparse identification of nonlinear dynamics (SINDy) algorithm to include inputs and control. The resulting SINDY with control (SINDYc) can be used...
See More
Understanding the Discrete Fourier Transform and the FFT
19 min
Beginner
Video
Theory
The discrete Fourier transform (DFT) transforms discrete time-domain signals into the frequency domain. The most efficient way to compute the DFT is using a fast Fourier transform (FFT)...
See More
Robust Control, Part 4: Working with Parameter Uncertainty
13 min
Beginner
Video
Theory
The previous two videos showed a few different ways to quantify how robust a system is to model and plant uncertainty by looking at how much input and output variation it can handle before...
See More
Introduction to Linear Quadratic Regulator (LQR) Control
96 min
Beginner
Video
Theory
In this video we introduce the linear quadratic regulator (LQR) controller. We show that an LQR controller is a full state feedback controller where the gain matrix K is computed by solving...
See More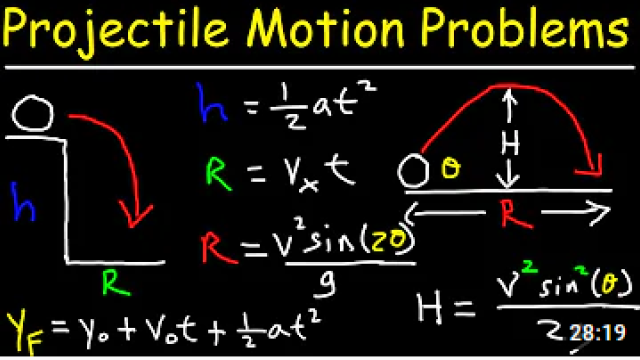
Projectile Motion Practice Problems
28 min
Intermediate
Video
Application
In this video, practice along questions on an important topic of Kinematics i.e Projectile Motion. Practicing would help you remember the concepts and also understand them better.
See More
Peter Ponders PID - Introduction
3 min
Beginner
Video
Theory
The purpose of this video is to inform the viewer about what to expect. My videos go much deeper than the typical videos. They are geared for graduate st...
See More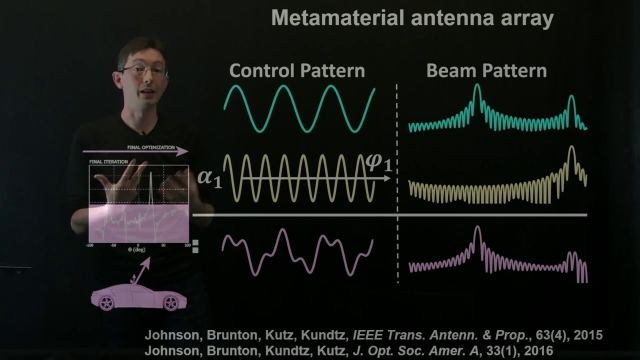
Extremum Seeking Control Applications
19 min
Beginner
Video
Application
This lecture highlights some of the many applications of extremum-seeking control (ESC) performed by Steve Brunton and collaborators.
See More
What Is a Control System and Why Should I Care? (Part 1)
38 min
Beginner
Video
Demonstration
This video is the first of a two part series. It in introduces the basic concepts of feedback with lots of visual examples. The idea is to show that not only are these principles...
See More
Wind Tunnel Testing: Introduction and Data Acquisition
28 min
Intermediate
Video
Theory
This is the first of our 3 part series on wind tunnel testing. In this video, we introduce the concept of wind tunnel testing as well as discuss the process for acquiring aerodynamic data in...
See More
Controlling Robotic Swarms
13 min
Beginner
Video
Theory
Come with me to the Robotics, Aerospace, and Information Networks lab at the University of Washington to learn the basics of swarm robotics. Find out how simple distributed algorithms can...
See More
Systems Engineering, Part 2: Towards a Model-Based Approach
13 min
Beginner
Video
Theory
The role of systems engineering is to help find and maintain a balance between the stakeholder needs, the management needs, and the engineering needs of a project. So we can think of it as...
See More
Learning Dynamic Systems & Control Engineering with a Video Game
Intermediate
Video
Demonstration
Engineering Students at Northern Illinois University are learning one of their core subjects, Dynamic Systems & Control, with the aid of a video game.
See More
Bridging the Gap: Using Real World Problems to Unveil Deep Control Principle...
52 min
Intermediate
Video
Application
This is a plenary lecture given at the 2020 IEEE Conference on Control Systems Technology, Montreal, Canada, August 24-26, 2020. There is no paper, but this is the video of the talk.
See More
Control System Lectures - Bode Plots, Introduction
12 min
Beginner
Video
Theory
This lecture is an introduction to frequency response methods, and in particular describes the Bode plot. I go through how it is generated and why we use it to visualize the frequency...
See More