

A New Approach to Linear Filtering and Prediction Problems
Advanced
Peer Reviewed Paper
Theory
A transcription of R.E. Kalman's seminal paper. Transcribed by John Lukesh, 20 January 2002
The classical filtering and prediction problem is re-examined using the Bode- Shannon...
See More
Free Video Course in Radar Systems Engineering
Beginner
Course
Theory
This Free Radar Systems Engineering Course (video, audio and screen captured ppt slides) and separate pdf slides) has been developed as a first course in Radar Systems for first year...
See More
Stanford Engineering Everywhere: CS223A - Introduction to Robotics
Beginner
Course
Theory
The purpose of this course is to introduce you to basics of modeling, design, planning, and control of robot systems. In essence, the material treated in this course is a brief survey of...
See More
Linear Algebra Review
Intermediate
Course
Theory
This short course is a quick review of linear algebra, intended for students who have already taken a previous course in linear algebra or have some experience with vectors and matrices. The...
See More
Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More
Guaranteed Margins for LQR Regulators
10 min
Intermediate
Peer Reviewed Paper
Theory
John Doyle's famous paper! He presents a counterexample that shows that are no guaranteed margins for LQG systems.
See More
Learning From Data
Beginner
Course
Theory
This is an introductory course in machine learning (ML) that covers the basic theory, algorithms, and applications. ML is a key technology in Big Data, and in many financial, medical...
See More
Systems modeling and representations (French)
Beginner
Course
Theory
Complete course on systems modeling. Includes examples, MATLAB code, and quizzes.
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
Intermediate
Peer Reviewed Paper
Theory
This paper represents a tutorial on the so called PES Pareto methodology of analyzing the sources of noise in a feedback loop. Originally conceived for analyzing noise contributors in...
See More
RADAR Engineering
200 min
Intermediate
Course
Theory
Radar technology is used widely today. The principles involved are very fundamental and every engineering student studies them at least once. This playlist covers Radar Engineering for an EE...
See More
Modelling, dynamics and control
Beginner
Course
Theory
How do we model the world around us and use this to understand its behaviour? How does behaviour depend upon the engineering choices we make and therefore how do we undertake design to...
See More
Process Dynamics and Control Course
Beginner
Course
Theory
This course focuses on a complete start to finish process of physics-based modeling, data driven methods, and controller design. Although some knowledge of computer programming is required...
See More
Perspectives on Control-Relevant Identification Through the Use of Interacti...
Intermediate
Peer Reviewed Paper
Theory
This paper presents a control-relevant identification methodology through an intuitive interactive tool called "Interactive Tool for Control Relevant Identification (ITCRI)". ITCRI...
See More
Full Stack Deep Learning
Intermediate
Course
Theory
There are many great courses to learn how to train deep neural networks. However, training the model is just one part of shipping a deep learning project. This course teaches full-stack...
See More
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More
Multi-agent reinforcement learning: An overview
Intermediate
Peer Reviewed Paper
Theory
From the abstract:
Multi-agent systems can be used to address problems in a variety of do- mains, including robotics, distributed control, telecommunications, and economics. The complexity...
See More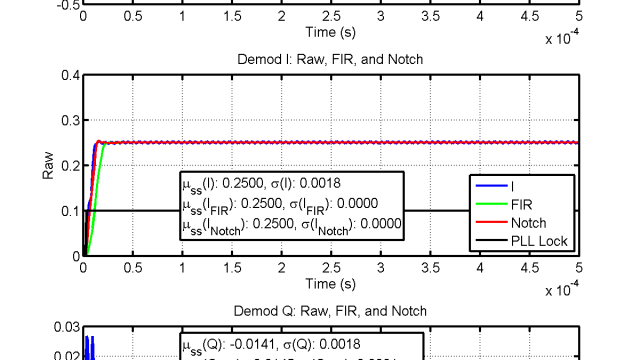
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
60 min
Intermediate
Peer Reviewed Paper
Theory
This paper is a brief tutorial on methods for using modulated signals in feedback loops, and especially of the different methods and trade offs used for demodulating those signals to get...
See More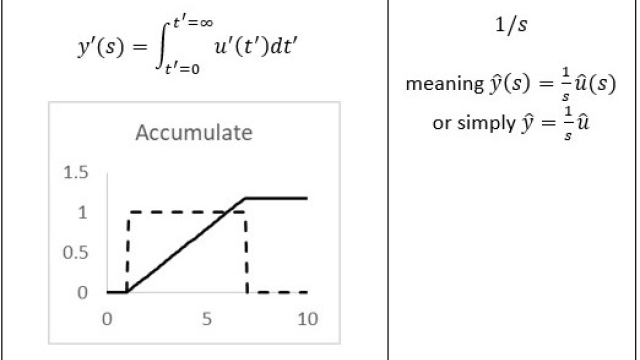
No! Not Laplace Transforms
60 min
Intermediate
Course
Theory
In my 13-year industrial career, I never used Laplace transforms. However, transfer functions and block diagram notation are efficient methods to describe dynamic behaviors, and are often...
See More
Benchmarking tools for a priori identifiability analysis
Advanced
Peer Reviewed Paper
Evaluation
Recent review and benchmark of software tools that can be used for assess the structural identifiability of dynamical systems
See More
CS224n: Natural Language Processing with Deep Learning | Winter 2021
Beginner
Course
Theory
This course covers the foundations of the effective modern methods for deep learning applied to NLP, a big picture understanding of human languages and the difficulties in understanding and...
See More
edX course: Dynamics and Control
Beginner
Course
Theory
This is an interactive course about the basic concepts of Systems, Control and their impact in all the human activities. First, the basic concepts of systems, dynamics, structure and control...
See More
Math Background for Machine Learning from Carnegie Melon University
Beginner
Course
Theory
This course provides a place for students to practice the necessary mathematical background for further study in machine learning — particularly for taking 10-601 and 10-701. Topics covered...
See More
Reinforcement Learning with MATLAB.
Beginner
Course
Application
This repository contains series of modules to get started with Reinforcement Learning with MATLAB.
It is divided into 4 stages.
In Stage 1, we start with learning RL concepts by manually...
See More
Experimental evaluation of feedforward tuning rules
Advanced
Peer Reviewed Paper
Demonstration
This paper presents a practical comparison for some of the most relevant tuning rules for feedforward compensators that have been published in the recent years. The work is focused on the...
See More
Yann LeCun’s Deep Learning Course at CDS
Intermediate
Course
Theory
This course concerns the latest techniques in deep learning and representation learning, focusing on supervised and unsupervised deep learning, embedding methods, metric learning...
See More