

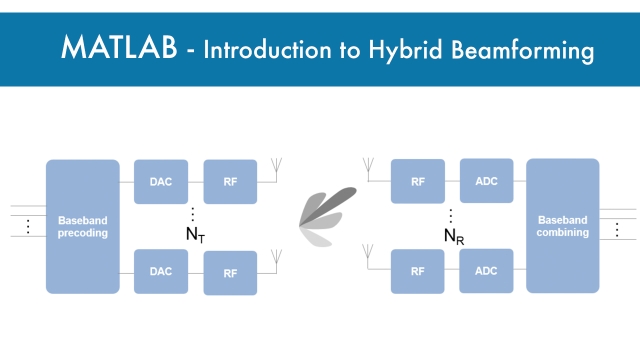
Introduction to Hybrid Beamforming
Beginner
Example
Application
This MATLAB example introduces the basic concept of hybrid beamforming and shows how to simulate such a system.
See More
Respect the Unstable
71 min
Beginner
Video
Theory
An understanding of fundamental limitations is an essential element in all engineering. Shannon's early results on channel capacity have always had center court in signal processing...
See More![Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_490.jpg?itok=qWteM4RS "Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]")
Pole Placement for the Inverted Pendulum on a Cart [Control Bootcamp]
12 min
Beginner
Video
Theory
Here we use the 'place' command in Matlab to design full-state feedback gains to specify the eigenvalues of the closed-loop system. This is demonstrated on the inverted pendulum on a cart.
See More
Radar Systems Engineering Lecture 4: The Radar Equation
Beginner
Presentation
Theory
This Free Radar Systems Engineering Course (video, audio and screen captured ppt slides) and separate pdf slides) has been developed as a first course in Radar Systems for first year...
See More
Control Bootcamp: Limitations on Robustness
9 min
Beginner
Video
Theory
This video describes some of the fundamental limitations of robustness, including time delays and right-half plane zeros.
See More
Data-Driven Control: Linear System Identification
20 min
Beginner
Video
Theory
Overview lecture on linear system identification and model reduction. This lecture discusses how we obtain reduced-order models from data that optimally capture input--output dynamics.
See More
Autonomous Navigation, Part 3: Understanding SLAM Using Pose Graph Optimizat...
16 min
Beginner
Video
Theory
This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous localization and mapping (SLAM) problem in autonomous navigation.
We’ll...
See More
Feedback in the Squishy Stuff: Introducing Chemical and Biological Process ...
29 min
Beginner
Video
Demonstration
Feedback doesn’t just happen in robots and self-driving cars, but in the regulation of our very bodies and in the ways in which we transform raw ingredients into materials we can use, be...
See More
Passivity-Based Control to Guarantee Stability | Control Systems in Practice...
15 min
Beginner
Video
Theory
Learn about passivity-based control to guarantee closed-loop stability of feedback systems. Consider different ways to assess the stability of systems other than looking at gain and phase...
See More
Introduction to Anomaly Detection for Engineers
15 min
Beginner
Video
Theory
Anomaly detection is the process of identifying events or patterns that differ from expected behavior. This is important for applications like predictive maintenance but can be hard to...
See More
Minami's Control School (Japanese)
Beginner
Video
Theory
教員のみなみゆうきです.専門は制御工学です.制御工学は「モノの動きをデザインする科学」です.制御工学を勉強したいという方に,僕の知識をすこしでも届けられると良いなと思い,YouTubeをやっています.
2019年の秋,講義ノートの作成の様子を撮影し,YouTubeに動画をアップロードしたのを契機として,動画作成をはじめました...
See More
Process Control is Inventory Control
10 min
Beginner
Article / Blog
Application
You change the inventory of heat to change temperature. You change the inventory of material to change level. Understanding how the inventory relates to the controlled variable is...
See More
Vectors, Dot Products, Cross Products - 3D Kinematics
50 min
Beginner
Video
Theory
Walter Lewin is one of the most reputed professors and was a former lecturer at MIT. His free to watch series on YouTube titled 8.01 is an excellent one for undergrads and high school...
See More
Základy automatizácie a teórie systémov – videokurz (Slovak)
Beginner
Article / Blog
Theory
Pozrite si videokurz zo základov teórie systémov a automatizácie. Náš kurz má 7 lekcií.
See More
Understanding the Discrete Fourier Transform and the FFT
19 min
Beginner
Video
Theory
The discrete Fourier transform (DFT) transforms discrete time-domain signals into the frequency domain. The most efficient way to compute the DFT is using a fast Fourier transform (FFT)...
See More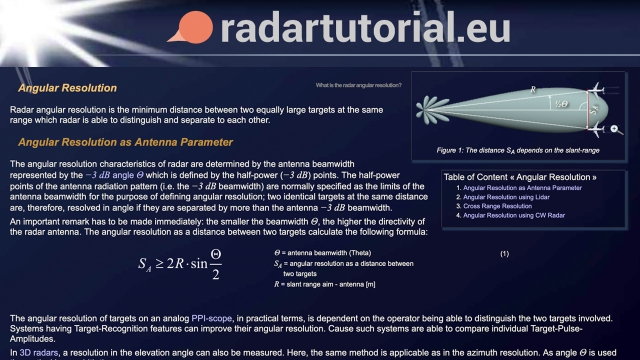
Radar Angular Resolution
Beginner
Article / Blog
Theory
This radartutorial.eu page describes angular resolution. Radar angular resolution is the minimum distance between two equally large targets at the same range which radar is able to...
See More
Controlling Robotic Swarms
13 min
Beginner
Video
Theory
Come with me to the Robotics, Aerospace, and Information Networks lab at the University of Washington to learn the basics of swarm robotics. Find out how simple distributed algorithms can...
See More
Systems Engineering, Part 5: Some Benefits of Model-Based Systems Engineerin...
12 min
Beginner
Video
Theory
Learn how model-based systems engineering (MBSE) can help you cut through the chaos of early systems development and get you from definition to execution more seamlessly.
You’ll hear the...
See More
Control Bootcamp: LQG Example in Matlab
13 min
Beginner
Video
Theory
This video combines the LQR and Kalman filter in Matlab on the example of an inverted pendulum on a cart. We stabilize the full nonlinear system with a measurement of a single variable (the...
See More
Reinforcement Learning: An Introduction
Beginner
Book
Theory
From the book introduction:
The idea that we learn by interacting with our environment is probably the first to occur to us when we think about the nature of learning. When an infant plays...
See More
Post-Pandemic: A Hybrid Lab Experience
Beginner
Article / Blog
Application
This article discusses the importance of a hybrid laboratory model, blending physical hardware with digital twins. Example using the Quanser Interactive Lab (QLabs) platform is given.
See More
Virtual Lab for a Two-tanks system
Beginner
Virtual Lab
Application
This is a virtual lab for a two-tank system that can be used for modelling and control learing/teaching purposes. Open-loop tests and closed-loop simulatons based on PI control or PI plus...
See More
Sending digital information over a wire | Networking tutorial (1 of 13)
4 min
Beginner
Video
Theory
This video lecture is the beginning of an exploration of computer networking with the basics of sending digital information with a copper wire.
Model Reference Adaptive Control Fundamentals (Dr. Tansel Yucelen)
91 min
Beginner
Video
Theory
Forum on Robotics & Control Engineering (FoRCE, http://force.eng.usf.edu/) Seminar Series: "Model Reference Adaptive Control Fundamentals" (Dr. Tansel Yucelen)
See More
Robotic Car - A Simple Way to Build a Model
15 min
Beginner
Video
Theory
You don't always have to work out the math in order to build up a model of your system. Sometimes generating a model is as easy as running a simple test and inspecting the results. I show...
See More