


The Routh-Hurwitz Stability Criterion
82 min
Beginner
Video
Theory
In this video we explore the Routh Hurwitz Stability Criterion and investigate how it can be applied to control systems engineering. The Routh Hurwitz Stabi...
See More
Peter Ponders PID - System Identification Advanced
19 min
Beginner
Video
Theory
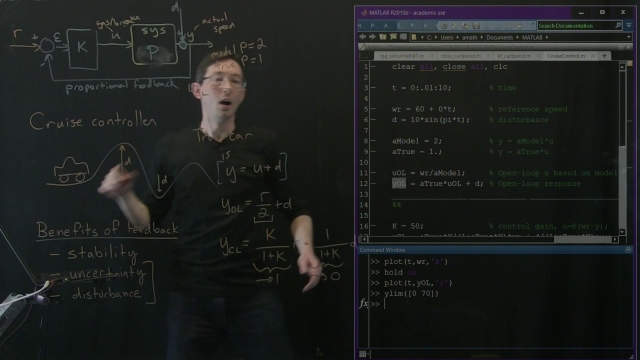
Control Bootcamp: Benefits of Feedback on Cruise Control Example (Part 2)
11 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example. (Part 2)
See More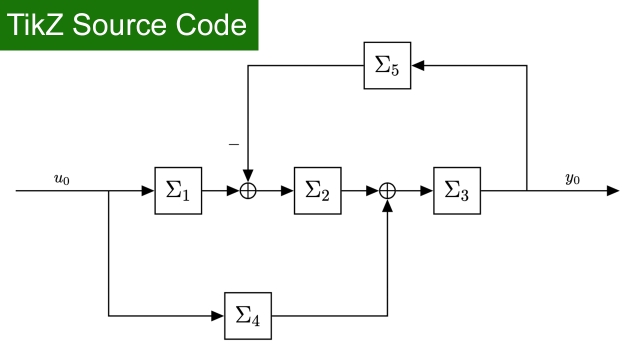
TikZ source Code: Nested subsystems
Beginner
Source Code
Application
TikZ source Code: Nested subsystems
See More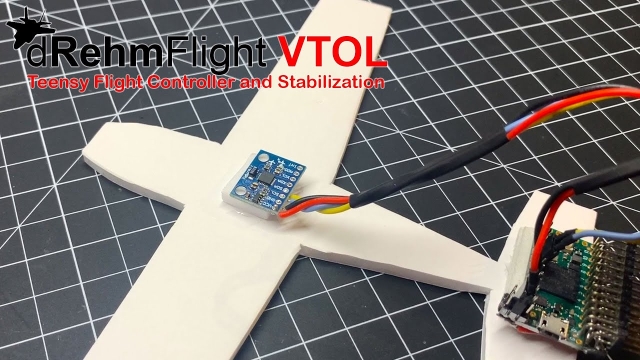
Mounting and Configuring the IMU - dRehmFlight VTOL
4 min
Beginner
Video
Application
This video will show you how to verify proper operation of the IMU for dRehmFlight VTOL before your first flight. It will also show you how to correctly mount the IMU to your aircraft. The...
See More")
Introduction to the Fourier Transform (Part 1)
13 min
Beginner
Video
Theory
This video is an introduction to the Fourier Transform. I try to give a little bit of background into what the transform does and then I go step by step through explaining the Inverse...
See More
Lecture 8: More on Transfer Functions
23 min
Beginner
Video
Theory
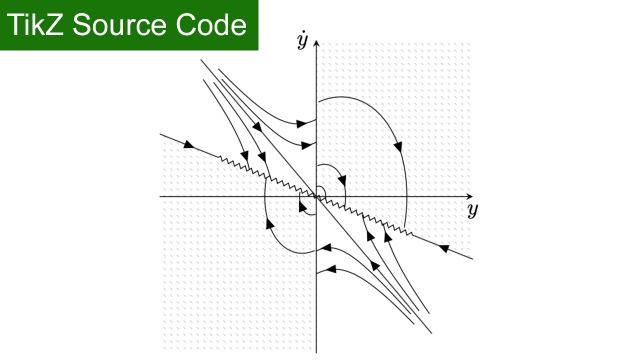
TikZ source Code: Sliding Mode Control Example
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example
See More
Lecture 24: Stability using Bode plots
46 min
Beginner
Video
Theory
![Randomized SVD Code [Matlab]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_401.jpg?itok=3jscmfnI)
Randomized SVD Code [Matlab]
9 min
Beginner
Video
Application
This video describes the randomized singular value decomposition (rSVD) (Matlab code).
See More
Lecture 27: Lead Compensator Design using Bode plots
70 min
Beginner
Video
Theory

Control Systems Lectures - LTI Systems
7 min
Beginner
Video
Theory
This lecture describes what it means when we say a system is linear and time invariant. I also try to give an example as to why these systems are so important when designing control systems...
See More
Bode Stability Criterion in Frequency Response Analysis Intro
12 min
Beginner
Video
Theory
The Bode stability criterion allows us to quickly determine the stability and relative stability of a transfer function. It uses a graphical method that can ...
See More
Derivation of Rodrigues’ Rotation Formula
43 min
Beginner
Video
Theory
In this video we explain and derive Rodrigues’ Rotation Formula. This functions describes how to rotate an arbitrary vector about another arbitrary axis of ...
See More
Machine Learning Overview
7 min
Beginner
Video
Theory
This lecture provides an overview of machine learning, and how it fits into this introductory video sequence on data science. We discuss how machine learning involves "modeling with data".
See More
Feedforward Control Intro
7 min
Beginner
Video
Theory
If we know how a disturbance will affect an output, we can proactively change our manipulated variable to counteract it.
See More")
Frequency domain – tutorial 13: sampling (theory of everything in signal pro...
25 min
Beginner
Video
Theory
In this video, we learn about sampling which enables us to travel from analog to digital world. The following materials are covered:1) why traveling to the ...
See More
Neural Networks: Caveats
8 min
Beginner
Video
Theory
This lecture discusses some key limitations of neural networks and suggests avenues of ongoing development.
See More
Direct Synthesis for PID Design Intro
11 min
Beginner
Video
Theory
Direct Synthesis for PID Design Intro
See More
Machine Learning Course by Andrew Ng
1120 min
Beginner
Course
Application
A very comprehensive and detailed course in machine learning , best suited for beginners with knowledge of high school linear mathematics.
See More
Time domain - tutorial 9: convolution examples
25 min
Beginner
Video
Theory
In this video, we use a systematic approach to solve lots of examples on convolution. By the end of this lecture, you should be able to find convolution betw...
See More
Understanding PID Control, Part 3: Expanding Beyond a Simple Derivative
11 min
Beginner
Video
Theory
This video describes how to make an ideal PID controller more robust when controlling real systems that don’t behave like ideal linear models. Noise is generated by sensors and is present in...
See More
Introduction to Ordinary Differential Equations
35 min
Beginner
Video
Theory
In this video we introduce the concept of ordinary differential equations (ODEs). We give examples of how these appear in science and engineering as well as...
See More
Why Learn Control Theory
5 min
Beginner
Video
Theory
In this video I present a few reasons why learning control theory is important and try to give some motivation to continue learning.
See More
The Laplace Transform
115 min
Beginner
Video
Theory
In this video we show how to perform the Laplace transform on a signal in the time domain to obtain its equivalent representation in the Laplace domain. Top...
See More