
Beginner
App
Application
Link to External Site
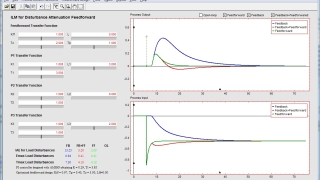
This interactive software tool is focused on basic and advanced concepts of feedforward control.
Radioactivity
0