

READ FIRST: How to learn PLC's and get into the Industrial Automation World ...
Beginner
Article / Blog
Theory
r/PLC is dedicated to discussion and questions about Programmable Logic Controllers (PLCs): "an industrial digital computer that has been ruggedized and adapted for the control of...
See More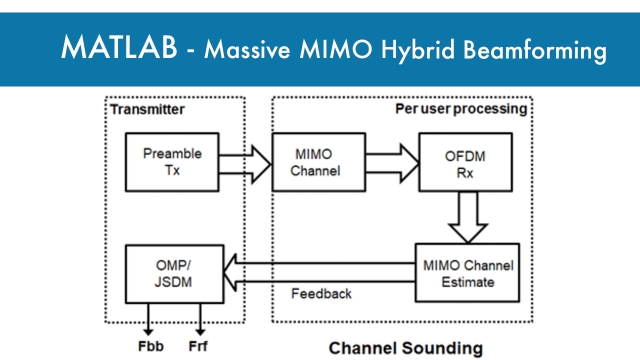
Massive MIMO Hybrid Beamforming
Beginner
Example
Application
This MATLAB example shows how hybrid beamforming is employed at the transmit end of a massive MIMO communications system, using techniques for both multi-user and single-user systems. The...
See More
Educational Tool for Teaching GRAFCET
Intermediate
App
Application
e-GRAFCET is a tool for supporting the teaching-learning process of GRAFCET ( which can be implemented using the programming language Sequential Function Chart – SFC). While this tool was...
See More
Autonomous Navigation, Part 1: What is Autonomous Navigation?
11 min
Beginner
Video
Theory
Navigation is the ability to determine your location within an environment and to be able to figure out a path that will take you to a goal. This video provides an overview of how we get a...
See More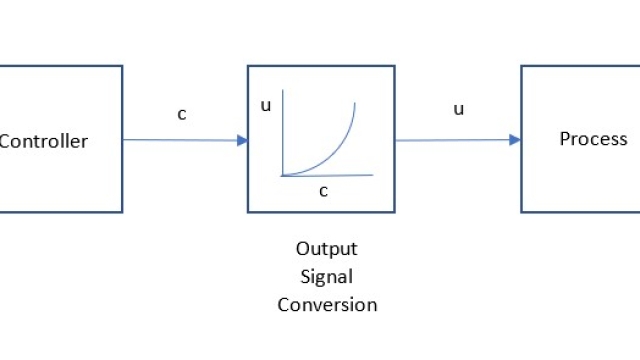
Nonlinear Control Output Signal Characterization
15 min
Intermediate
Article / Blog
Application
If the process gain makes large changes over the operating range, then tuning PID (or other linear) controllers is difficult. If tuned for one region, the controller is undesirably sluggish...
See More
Systems Engineering, Part 3: The Benefits of Functional Architectures
14 min
Beginner
Video
Theory
Functional, logical, and physical architectures are important tools for designing complex systems. We describe what architectures are and how they contribute to the early stages of a project...
See More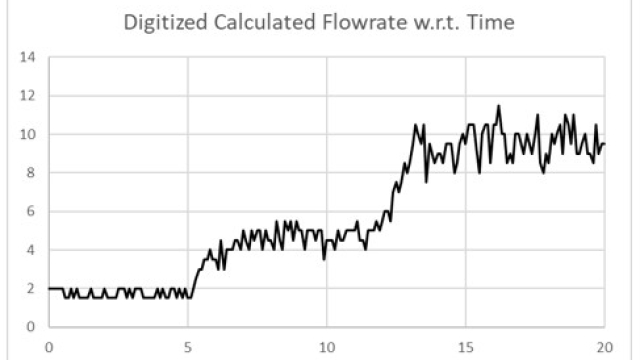
Measurements, Transmission Signals, and Issues
45 min
Intermediate
Article / Blog
Application
This is an introduction to scaled information transmission signals (for example 4-20 mA, 3-15 psig, etc.), the actual sensed signals (like using orifice dP to infer flow rate, or temperature...
See More
Introduction to Linear Quadratic Regulator (LQR) Control
96 min
Beginner
Video
Theory
In this video we introduce the linear quadratic regulator (LQR) controller. We show that an LQR controller is a full state feedback controller where the gain matrix K is computed by solving...
See More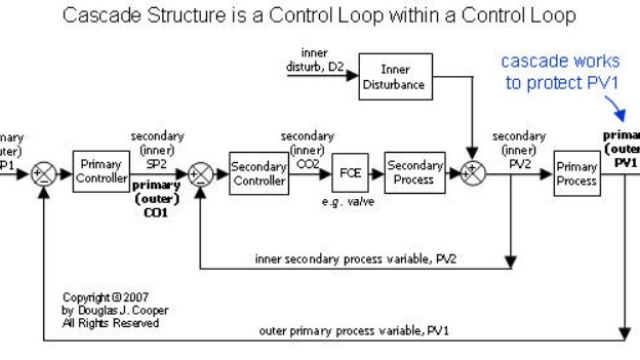
Introduction to the A* Algorithm
15 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* algorithm using motivating examples from computer games.
See More

MATLAB Command: resid
Intermediate
Article / Blog
Application
This MATLAB command is part of the system identification toolbox and provides a way to compute and test residuals.
See More
Simulink Onramp
120 min
Beginner
Tutorial
Demonstration
Learn the basics of how to create, edit, and simulate models in Simulink®. Use block diagrams to represent real-world systems and simulate components and algorithms.
See More
Respect the Unstable
71 min
Beginner
Video
Theory
An understanding of fundamental limitations is an essential element in all engineering. Shannon's early results on channel capacity have always had center court in signal processing...
See More
The Braitenberg Vehicles
15 min
Beginner
Video
Theory
This video explores the world of simple logical robots as described by Valentino Braitenberg in his book Vehicles, Experiments in Synthetic Psychology. With very simple linkages between...
See More
Why Padé Approximations Are Great! | Control Systems in Practice
Beginner
Video
Theory
Watch an introduction to Padé approximations. Learn what Padé approximations are and how to calculate them, why they are important, and when to use them—specifically in the context of time...
See More
MATLAB Online
Beginner
App
Application
Use MATLAB and Simulink through your web browser. No downloads or installations. MATLAB® Online™ provides access to MATLAB and Simulink from any standard web browser wherever you have...
See More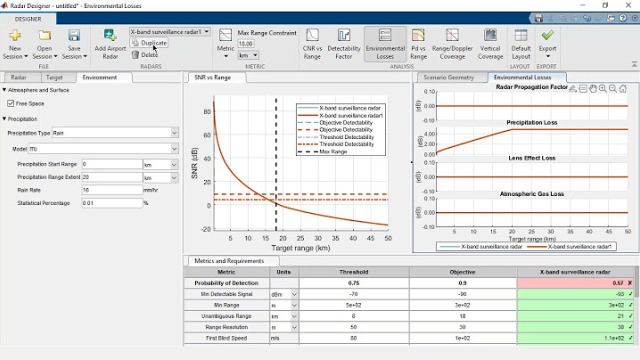
Radar Design with the Radar Designer App
5 min
Beginner
Video
Theory
The Radar Designer app is an interactive tool that assists engineers and system analysts with high-level design and assessment of radar systems at the early stage of radar development.
See More
Student's Guide to Bayesian Statistics
15 min
Beginner
Video
Theory
This video provides a summary of a textbook Bed Lambert wrote on Bayesian inference and accompanying (freely available) YouTube course.
See More
Why multichannel beamforming is useful for wireless communication
13 min
Beginner
Video
Theory
Wireless communication systems like 5G and WiFi usually have to serve many users simultaneously and they have to deal with multiple paths between two radios when operating in a scattering...
See More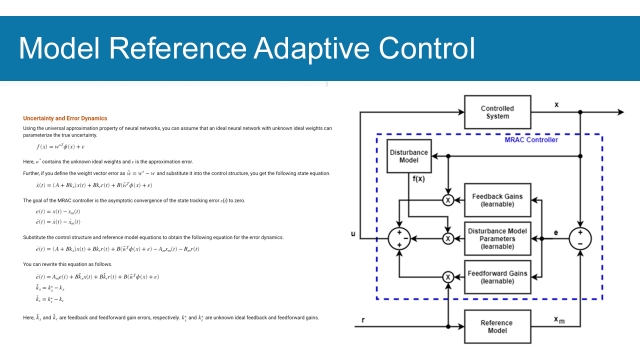
Mathworks Model Reference Adaptive Control Overview
Beginner
Article / Blog
Theory
This website provides an overview of the mathematics behind Model Reference Adaptive Control (MRAC). MRAC is a model-based, real-time adaptive control algorithm that computes control actions...
See More
So You Want to be a Systems Engineer
53 min
Beginner
Video
Theory
A presentation by Gentry Lee on what qualities and characteristics make a great systems engineer. At the time of the presentation, Gentry Lee was the Chief Engineer for the Solar System...
See More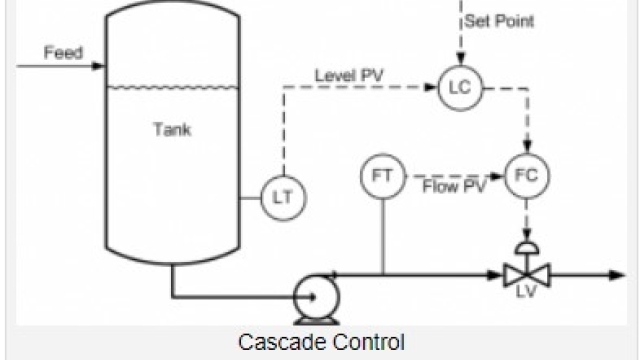
Cascade Control
30 min
Intermediate
Article / Blog
Application
What is Cascade Control and why use it?
See More
A* Pathfinding (E01: algorithm explanation)
12 min
Beginner
Video
Theory
Welcome to the first part in a series teaching pathfinding for video games. In this episode we take a look at the A* algorithm and how it works.
See More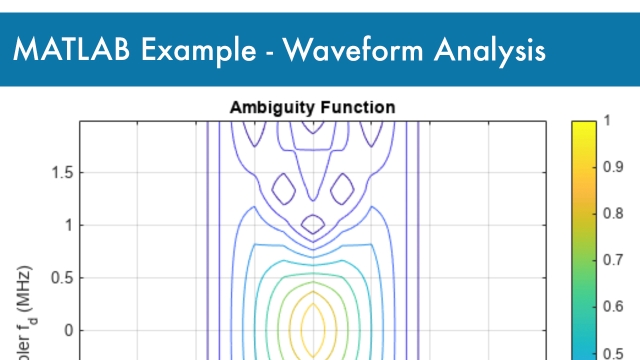
MATLAB Example: Waveform Analysis Using the Ambiguity Function
Intermediate
Example
Application
This example shows how to use the ambiguity function to analyze waveforms. It compares range and Doppler capabilities of several common pulsed waveforms such as the rectangular waveform, the...
See More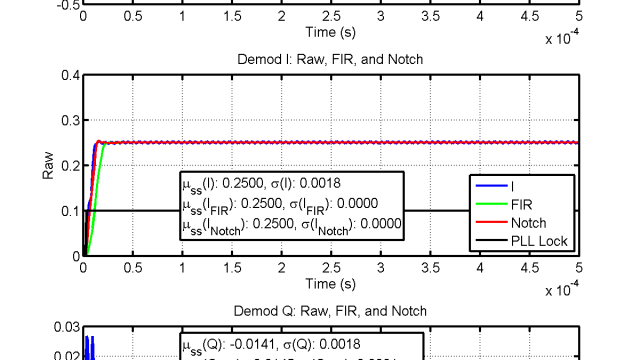
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
60 min
Intermediate
Peer Reviewed Paper
Theory
This paper is a brief tutorial on methods for using modulated signals in feedback loops, and especially of the different methods and trade offs used for demodulating those signals to get...
See More