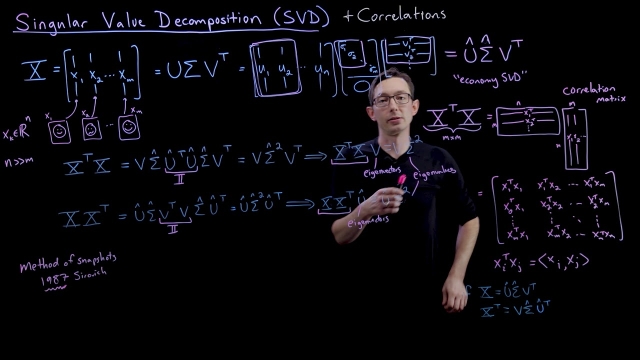
SVD Method of Snapshots
4 min
Beginner
Video
Theory
This video describes how to compute the singular value decomposition (SVD) using the method of snapshots, by Sirovich 1987.
See More
Using ‘rlocus’ in Matlab to Plot the Root Locus
19 min
Beginner
Video
Application
This tutorial illustrates how to use the ‘rlocus’ command in Matlab to quickly and easily sketch the root locus.Discussion on the 3 example transfer function...
See More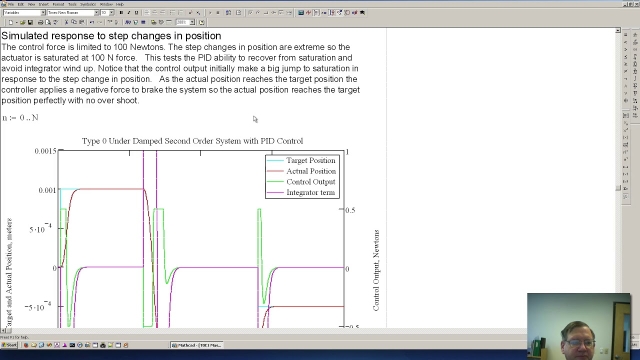
Peter Ponders PID - Controlling an Under Damp Mass and Spring System
24 min
Beginner
Video
Theory
Demonstrates:How to calculate the PID gains. The importance of the derivative gain. How to simulate the mass and spring systemControl limitations based on s...
See More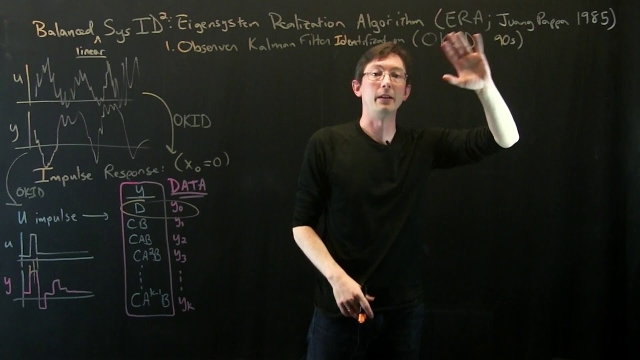
Data-Driven Control: Observer Kalman Filter Identification
12 min
Intermediate
Video
Theory
In this lecture, we introduce the observer Kalman filter identification (OKID) algorithm. OKID takes natural input--output data from a system and estimates the impulse response, for later...
See More
Unitary Transformations
12 min
Beginner
Video
Theory
This video discusses unitary matrix transformations and how they relate to the geometry of the singular value decomposition (SVD).
See More
Relationship Between Poles and Performance of a Dynamic System
43 min
Beginner
Video
Theory
In this video we establish the relationship between pole locations and associated performance of a dynamic system. This relationship is useful to translate ...
See More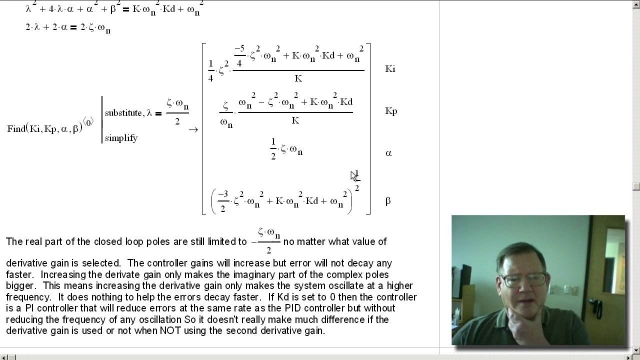
Peter Ponders PID - Why PID with 2nd Derivative Gain?
27 min
Beginner
Video
Theory
If you have ever tuned a hydraulic system and wondered why PID control didn't work better than PI control the answer is here. Since the 1980s people have kn...
See More
Drone Simulation and Control, Part 3: How to Build the Flight Code
18 min
Beginner
Video
Theory
This video describes how to create quadcopter flight software from the control architecture developed in the last video. It covers how to process the raw sensor readings and use them with...
See More![Linear Systems [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_441.jpg?itok=5LYUu0Zj "Linear Systems [Control Bootcamp]")
Linear Systems [Control Bootcamp]
24 min
Beginner
Video
Theory
Linear systems of ordinary differential equations are analyzed using eigenvalues and eigenvectors. This will be the mathematical foundation of this bootcamp on linear control theory.
See More
Time domain - tutorial 7: system properties
22 min
Beginner
Video
Theory
In this video, we cover system properties. The concept of memoryless, causal, stable, invertible, time-invariant and linear systems is intuitively explained...
See More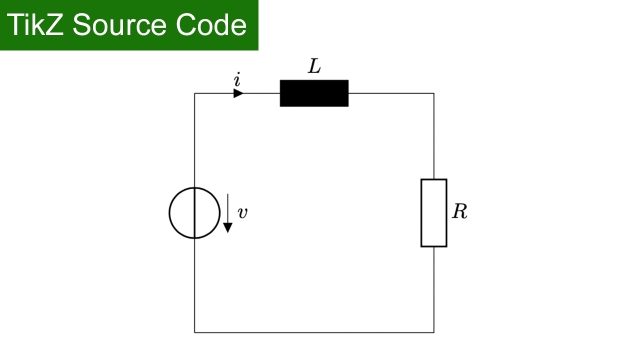
TikZ source Code: RL Series
Beginner
Source Code
Application
TikZ source Code for RL Series.
See More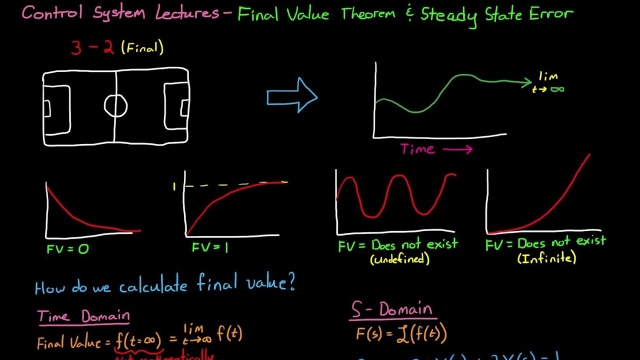
Final Value Theorem and Steady State Error
12 min
Beginner
Video
Theory
This Final Value Theorem is a way we can determine what value the time domain function approaches at infinity but from the S-domain transfer function. This is very helpful when we're trying...
See More
Types of Machine Learning 1
6 min
Beginner
Video
Theory
This lecture gives an overview of the main categories of machine learning, including supervised, un-supervised, and semi-supervised techniques, depending on the availability of expert labels...
See More
dRehmFlight VTOL - Teensy (Arduino) Flight Controller and Stabilization
5 min
Beginner
Video
Application
dRehmFlight VTOL is a new flight controller and stabilization package intended to be used for small to medium sized hobby or research projects. dRehmFlight is the code, and the physical...
See More
Computing Euler Angles: Tracking Attitude Using Quaternions
74 min
Intermediate
Video
Theory
In this video we continue our discussion on how to track the attitude of a body in space using quaternions. The quaternion method is similar to the Euler Kinematical Equations and Poisson...
See More
Time domain - tutorial 10: interconnection of LTI systems
7 min
Beginner
Video
Theory
In this video, we learn how to connect LTI systems to make a bigger system. The learning objectives are to:1) get familiar with parallel and series intercon...
See More
TikZ source Code: matlab2tikz example
Beginner
Source Code
Application
TikZ source Code: matlab2tikz example
See More
Solving the Heat Equation with the Fourier Transform
11 min
Beginner
Video
Theory
This video describes how the Fourier Transform can be used to solve the heat equation. In fact, the Fourier transform is a change of coordinates into the eigenvector coordinates for the...
See More
Control Systems in Practice, Part 6: What Are Non-Minimum Phase Systems?
14 min
Beginner
Video
Theory
We like to categorize transfer functions into groups and label them because it helps us understand how a particular system will behave simply by knowing the group that it’s part of. We gain...
See More
Feedback Control and Block Diagram Introduction
10 min
Beginner
Video
Theory
How do engineers begin to design controllers to respond to disturbances and maintain set points? In this example, I'll discuss how we can design a controller...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 8 - Policy Gr...
71 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Lecture 29: State space representation
29 min
Beginner
Video
Theory

Simple Examples of PID Control
13 min
Beginner
Video
Theory
In this video I continue the topic of PID control. We walk through a simple control system and visualize how each of the three paths, P, I, and D, all address specific problems that arise...
See More
Second Order Dynamics Example
4 min
Beginner
Video
Theory
How will a second order process respond in the time domain when subjected to a unit step input? What other behaviors can we expect to see and why? Tune in to...
See More