

A New Approach to Linear Filtering and Prediction Problems
Advanced
Peer Reviewed Paper
Theory
A transcription of R.E. Kalman's seminal paper. Transcribed by John Lukesh, 20 January 2002
The classical filtering and prediction problem is re-examined using the Bode- Shannon...
See More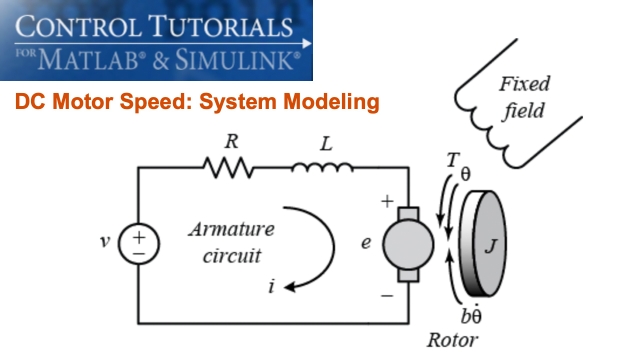
DC Motor Speed: System Modeling
Beginner
Project
Theory
This examples walks through modeling a simple DC motor in MATLAB.
See More
TinyEKF: Lightweight C/C++ Extended Kalman Filter with Python for prototypin...
Intermediate
Software
Application
TinyEKF is a simple C/C++ implementation of the Extended Kalman Filter that is general enough to use on different projects. In order to make it practical for running on Arduino, STM32, and...
See More
Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More
Guaranteed Margins for LQR Regulators
10 min
Intermediate
Peer Reviewed Paper
Theory
John Doyle's famous paper! He presents a counterexample that shows that are no guaranteed margins for LQG systems.
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
Intermediate
Peer Reviewed Paper
Theory
This paper represents a tutorial on the so called PES Pareto methodology of analyzing the sources of noise in a feedback loop. Originally conceived for analyzing noise contributors in...
See More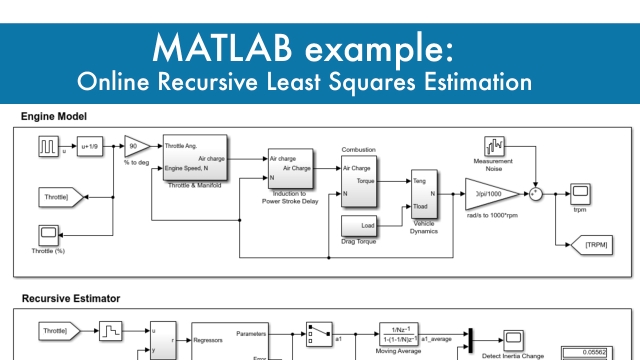
MATLAB Example: Online Recursive Least Squares Estimation
Intermediate
Project
Demonstration
This example shows how to implement an online recursive least squares estimator. You estimate a nonlinear model of an internal combustion engine and use recursive least squares to detect...
See More
MATLAB toolbox for control 101 course
Beginner
Software
Theory
Community toolbox project led by Anthony Rossiter and sponsored by MathWorks. The project incorporates input from various international collaborators. The aim is to make the developed...
See More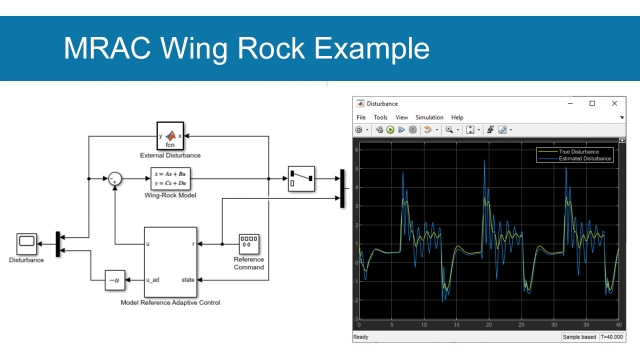
Model Reference Adaptive Control of Aircraft Undergoing Wing Rock
Intermediate
Project
Theory
This example shows how to control roll and roll rate of a delta wing aircraft undergoing wing rock. For this example, the system model is unknown. Therefore, you use model reference adaptive...
See More
MPCTools: Nonlinear Model Predictive Control Tools for CasADi (Python Interf...
Intermediate
Software
Application
This Python package is a collection of model predictive control tools that build on CasADi by providing a simpler interface. Along with the python package, there are a bunch of example files...
See More
Algorithms for Automated Driving
Intermediate
Project
Application
Each chapter of this (mini-)book guides you in programming one important software component for automated driving. Currently, this book contains two chapters: Lane Detection, and Control...
See More
MATLAB Function: ztrans
Intermediate
Software
Application
ztrans(f) finds the Z-Transform of f. By default, the independent variable is n and the transformation variable is z. If f does not contain n, ztrans uses symvar.
See More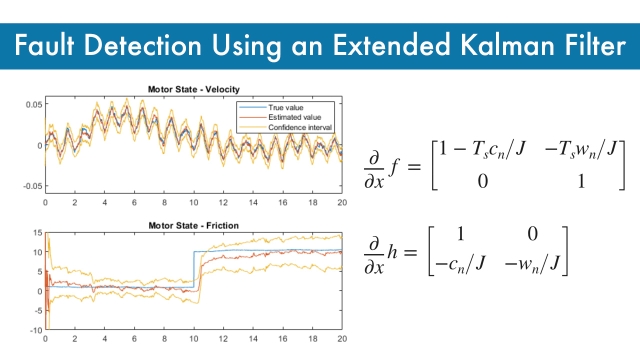
MATLAB Example: Fault Detection Using an Extended Kalman Filter
Intermediate
Project
Application
This example shows how to use an extended Kalman filter for fault detection. The example uses an extended Kalman filter for online estimation of the friction of a simple DC motor...
See More
Model predictive control python toolbox
Intermediate
Software
Application
do-mpc is a comprehensive open-source toolbox for robust model predictive control (MPC) and moving horizon estimation (MHE). do-mpc enables the efficient formulation and solution of control...
See More
Perspectives on Control-Relevant Identification Through the Use of Interacti...
Intermediate
Peer Reviewed Paper
Theory
This paper presents a control-relevant identification methodology through an intuitive interactive tool called "Interactive Tool for Control Relevant Identification (ITCRI)". ITCRI...
See More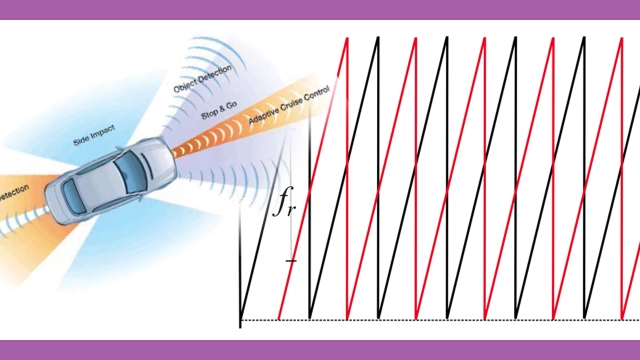
Fast chirp FMCW Radar in automotive applications
Advanced
Peer Reviewed Paper
Theory
FMCW (frequency-modulated continuous wave radar) modulations have been popularly implemented in the automotive radar applications. This document demonstrates system requirement for a new...
See More
Jupyter Notebook: Code used to generate vibrational control of inverted pend...
Intermediate
Software
Demonstration
Jupyter Notebook: Code used to generate vibrational control of inverted pendulum figures
See More
Multi-agent reinforcement learning: An overview
Intermediate
Peer Reviewed Paper
Theory
From the abstract:
Multi-agent systems can be used to address problems in a variety of do- mains, including robotics, distributed control, telecommunications, and economics. The complexity...
See More
Python Control Systems Library
Intermediate
Software
Application
The python-control package is a set of python classes and functions that implement common operations for the analysis and design of feedback control systems. The initial goal is to implement...
See More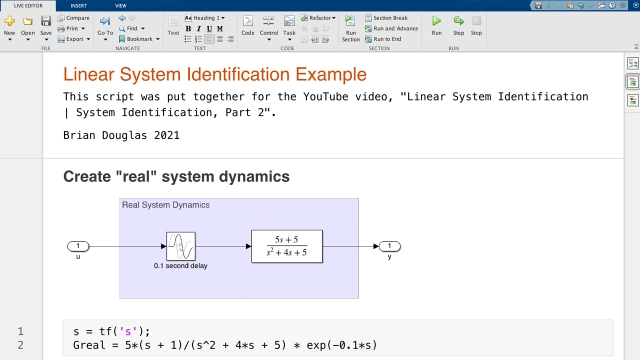
MATLAB Scripts for video "Linear System Identification | System Identificati...
Intermediate
Software
Demonstration
This Github repo contains the data files and MATLAB scripts that were used in the MATLAB Tech Talk video "Linear System Identification | System Identification, Part 2"
See More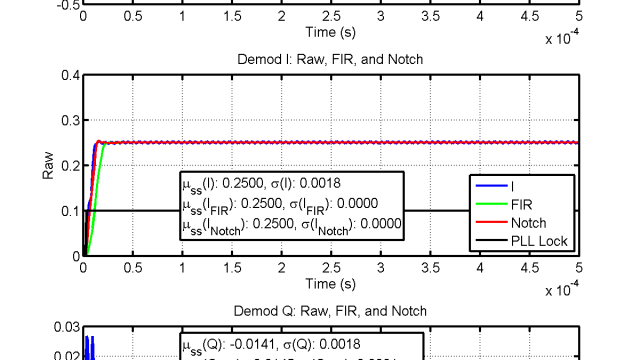
The Demod Squad: A Tutorial on the Utility and Methodologies for Using Modul...
60 min
Intermediate
Peer Reviewed Paper
Theory
This paper is a brief tutorial on methods for using modulated signals in feedback loops, and especially of the different methods and trade offs used for demodulating those signals to get...
See More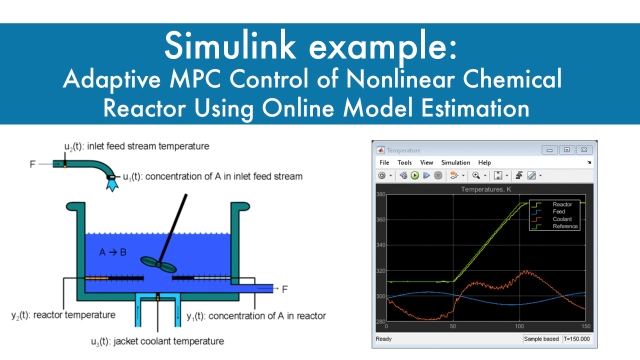
Simulink example: Adaptive MPC Control of Nonlinear Chemical Reactor Using O...
Intermediate
Project
Application
This example shows how to use an Adaptive MPC controller to control a nonlinear continuous stirred tank reactor (CSTR) as it transitions from low conversion rate to high conversion rate.
A...
See More
Benchmarking tools for a priori identifiability analysis
Advanced
Peer Reviewed Paper
Evaluation
Recent review and benchmark of software tools that can be used for assess the structural identifiability of dynamical systems
See More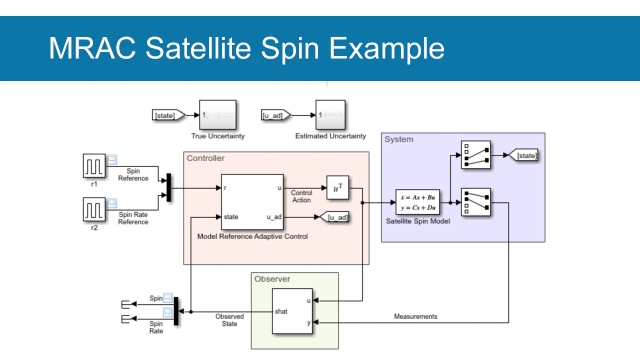
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More
Experimental evaluation of feedforward tuning rules
Advanced
Peer Reviewed Paper
Demonstration
This paper presents a practical comparison for some of the most relevant tuning rules for feedforward compensators that have been published in the recent years. The work is focused on the...
See More