

A New Approach to Linear Filtering and Prediction Problems
Advanced
Peer Reviewed Paper
Theory
A transcription of R.E. Kalman's seminal paper. Transcribed by John Lukesh, 20 January 2002
The classical filtering and prediction problem is re-examined using the Bode- Shannon...
See More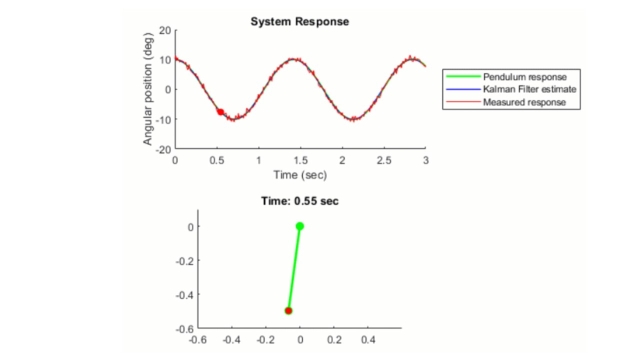
Kalman Filter Virtual Lab
Intermediate
Virtual Lab
Application
The Kalman Filter virtual laboratory contains interactive exercises that let you study linear and extended Kalman filter design for state estimation of a simple pendulum system. The virtual...
See More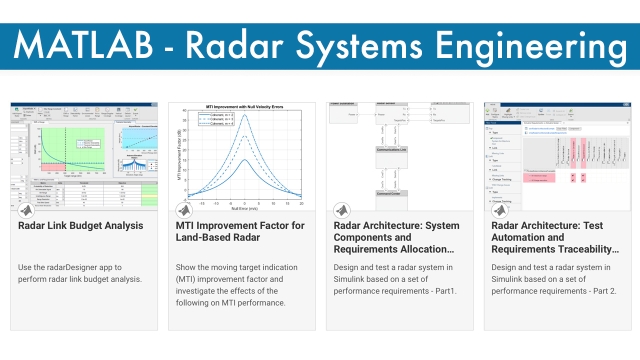
Radar Systems Engineering MATLAB Documentation and Examples
Intermediate
Example
Theory
The functions in this section give you the MATLAB tools needed to evaluate the performance of a radar system. You can use the radar equation to evaluate the radar received signal-to-noise...
See More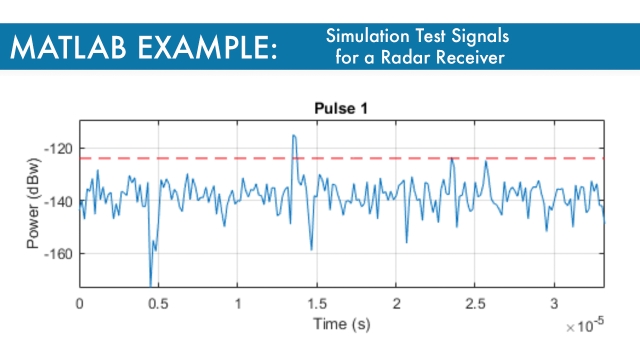
Simulating Test Signals for a Radar Receiver
Intermediate
Example
Application
This example shows how to simulate received signal of a monostatic pulse radar to estimate the target range. A monostatic radar has the transmitter collocated with the receiver. The...
See More
A Tutorial on PES Pareto Methods for Analysis of Noise Propagation in Feedba...
Intermediate
Peer Reviewed Paper
Theory
This paper represents a tutorial on the so called PES Pareto methodology of analyzing the sources of noise in a feedback loop. Originally conceived for analyzing noise contributors in...
See More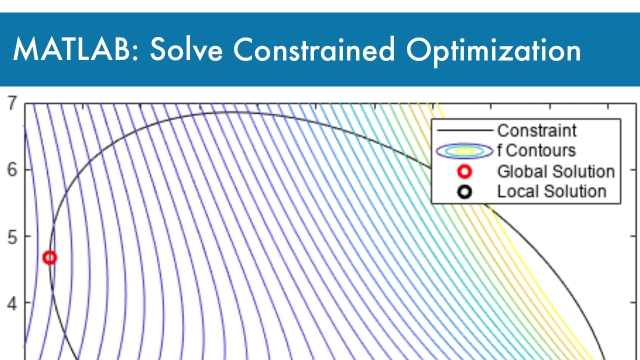
MATLAB Example: Solve Constrained Nonlinear Optimization, Problem-Based
Intermediate
Example
Theory
This example shows how to find the minimum of a nonlinear objective function with a nonlinear constraint by using the problem-based approach.
See More
Virtual Labs for control education
Intermediate
Virtual Lab
Theory
This resource provides different links to virtual and remote labs that can be used for control education. Virtual and remote labs are very powerful tools for learning and teaching, that...
See More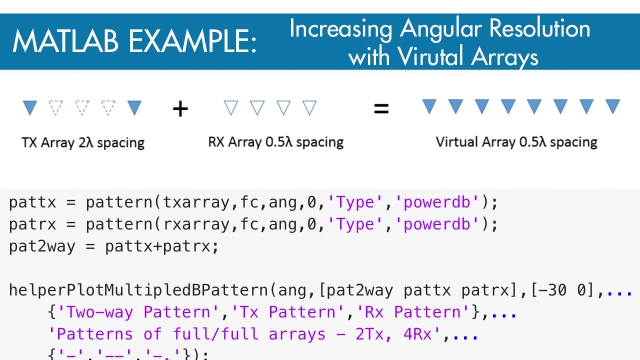
Increasing Angular Resolution with Virtual Arrays
Intermediate
Example
Application
This MATLAB example introduces how forming a virtual array in MIMO radars can help increase angular resolution. It shows how to simulate a coherent MIMO radar signal processing chain using...
See More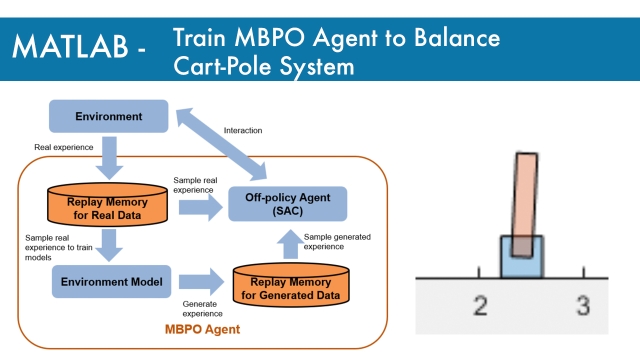
MATLAB Example: Train MBPO Agent to Balance Cart-Pole System
Intermediate
Example
Demonstration
This example shows how to train a model-based policy optimization (MBPO) agent to balance a cart-pole system modeled in MATLAB. For more information on MBPO agents, see Model-Based Policy...
See More
Creating Discrete-Time Models
Intermediate
Example
Theory
This MATLAB example shows how to create discrete-time linear models using the tf, zpk, ss, and frd commands.
Perspectives on Control-Relevant Identification Through the Use of Interacti...
Intermediate
Peer Reviewed Paper
Theory
This paper presents a control-relevant identification methodology through an intuitive interactive tool called "Interactive Tool for Control Relevant Identification (ITCRI)". ITCRI...
See More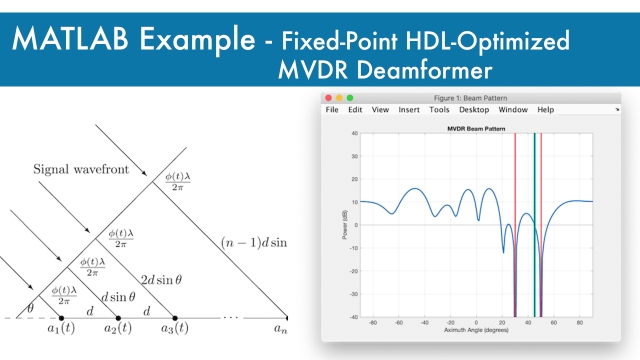
Fixed-Point HDL-Optimized Minimum-Variance Distortionless-Response (MVDR) Be...
Intermediate
Example
Application
This example shows how to implement a fixed-point HDL-optimized minimum-variance distortionless-response (MVDR) beamformer in MATLAB.
See More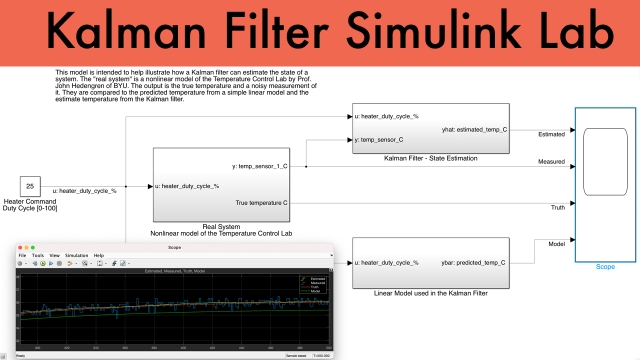
Kalman Filter Simulink 2022A example
Intermediate
Virtual Lab
Demonstration
This model is intended to help illustrate how a Kalman filter can estimate the state of a system. The "real system" is a nonlinear model of the Temperature Control Lab by Prof. John...
See More
Manuscript about ITISE: an Interactive Software Tool for System Identificati...
Intermediate
Peer Reviewed Paper
Theory
The paper describes the conceptual basis, main features and functionality of an interactive software tool developed in support of system identification education and discovery.
This...
See More
Guaranteed Margins for LQR Regulators
10 min
Intermediate
Peer Reviewed Paper
Theory
John Doyle's famous paper! He presents a counterexample that shows that are no guaranteed margins for LQG systems.
See More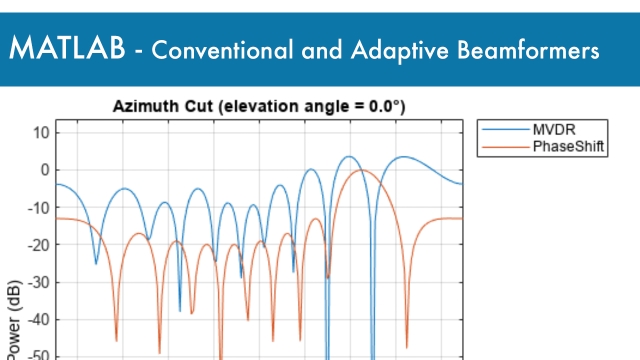
Conventional and Adaptive Beamformers
Intermediate
Example
Application
This example illustrates how to apply digital beamforming to a narrowband signal received by an antenna array. Three beamforming algorithms are illustrated: the phase shift beamformer...
See More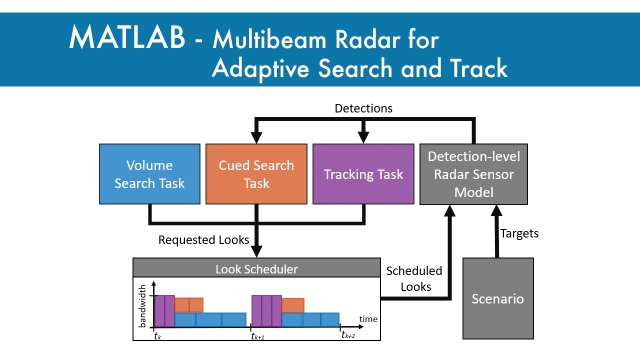
Multibeam Radar for Adaptive Search and Track
Intermediate
Example
Application
This MATLAB example shows how to use radarDataGenerator for a closed-loop simulation of a multifunction phased array radar (MPAR). The example starts by defining MPAR system parameters and...
See More
Benchmarking tools for a priori identifiability analysis
Advanced
Peer Reviewed Paper
Evaluation
Recent review and benchmark of software tools that can be used for assess the structural identifiability of dynamical systems
See More
Control Loop Foundation Batch and Continuous Processes - Interactive Source ...
Intermediate
Virtual Lab
Application
Control Loop Foundation contains workshops that allow the reader to get hands on experience through this web interface. Once a lab is selected, then you may access workshop directions and...
See More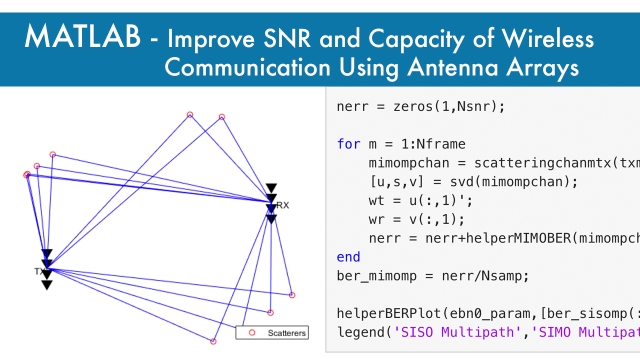
Improve SNR and Capacity of Wireless Communication Using Antenna Arrays
Beginner
Example
Application
The goal of a wireless communication system is to serve as many users with the highest possible data rate given constraints such as radiation power limit and operating budget. To improve the...
See More
Experimental evaluation of feedforward tuning rules
Advanced
Peer Reviewed Paper
Demonstration
This paper presents a practical comparison for some of the most relevant tuning rules for feedforward compensators that have been published in the recent years. The work is focused on the...
See More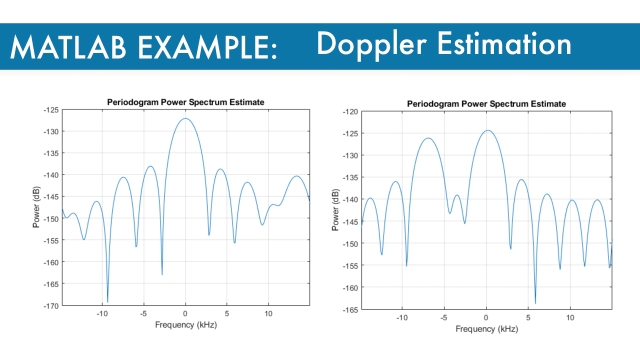
MATLAB Example: Doppler Estimation
Intermediate
Example
Application
This example shows a monostatic pulse radar detecting the radial velocity of moving targets at specific ranges. The speed is derived from the Doppler shift caused by the moving targets. We...
See More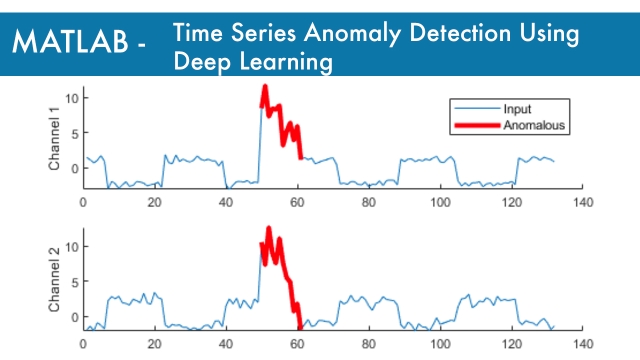
Time Series Anomaly Detection Using Deep Learning
Intermediate
Example
Demonstration
This example shows how to detect anomalies in sequence or time series data.
To detect anomalies or anomalous regions in a collection of sequences or time series data, you can use an...
See More
Vibrational control of nonlinear systems: Vibrational controllability and tr...
Intermediate
Peer Reviewed Paper
Theory
In the first part of this work, the criteria for the existence of stabilizing parametric oscillations have been derived. In the present paper, the problem of choosing the stabilizing...
See More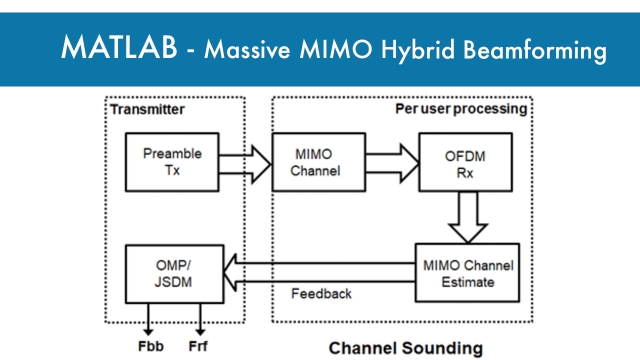
Massive MIMO Hybrid Beamforming
Beginner
Example
Application
This MATLAB example shows how hybrid beamforming is employed at the transmit end of a massive MIMO communications system, using techniques for both multi-user and single-user systems. The...
See More