


Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 1 - Introduct...
66 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

RL Course by David Silver - Lecture 7: Policy Gradient Methods
94 min
Intermediate
Video
Theory
Looks at different policy gradients, including Finite Difference, Monte-Carlo and Actor Critic.
See More
Euler Angles and the Euler Rotation Sequence
70 min
Intermediate
Video
Theory
In this video we discuss how Euler angles are used to define the relative orientation of one coordinate frame to another.
See More
Data-Driven Control: Balanced Proper Orthogonal Decomposition
27 min
Intermediate
Video
Theory
In this lecture, we introduce the balancing proper orthogonal decomposition (BPOD) to approximate balanced truncation for high-dimensional systems.
See More
Extremum Seeking Control: Challenging Example
8 min
Intermediate
Video
Theory
This lecture explores the use of extremum-seeking control (ESC) to solve a challenging control problem with a right-half plane zero.
See More
The Frobenius Norm for Matrices
2 min
Intermediate
Video
Theory
This video describes the Frobenius norm for matrices as related to the singular value decomposition (SVD).
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 10 - Policy G...
81 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

Smart Projectile State Estimation Using Evidence Theory
Intermediate
Peer Reviewed Paper
Theory
This journal article provides a very good practical understanding of Dempster-Shafer theory using sensor fusion and state estimation as the backdrop.
See More
The Navigation Equations: Computing Position North, East, and Down
52 min
Intermediate
Video
Theory
In this video we show how to compute the inertial velocity of a rigid body in the vehicle-carried North, East, Down (NED) frame. This is achieved by rotating the velocity expressed in the...
See More
Data-Driven Control: Change of Variables in Control Systems (Correction)
2 min
Intermediate
Video
Theory
This video corrects a typo in the previous lecture.
See More")
Koopman Spectral Analysis (Multiscale systems)
5 min
Intermediate
Video
Theory
In this video, we discuss recent applications of data-driven Koopman theory to multi-scale systems.
See More
RL Course by David Silver - Lecture 1: Introduction to Reinforcement Learnin...
88 min
Intermediate
Video
Theory
Introduces reinforcment learning (RL), an overview of agents and some classic RL problems.
See More
Manipulating Aerodynamic Coefficients
25 min
Intermediate
Video
Theory
In this video we discuss some potential problems you may encounter when attempting to perform operations with dimensionless aerodynamic coefficients such as CL and CD.
See More
Data-Driven Control: Observer Kalman Filter Identification
12 min
Intermediate
Video
Theory
In this lecture, we introduce the observer Kalman filter identification (OKID) algorithm. OKID takes natural input--output data from a system and estimates the impulse response, for later...
See More
Randomized SVD: Power Iterations and Oversampling
4 min
Intermediate
Video
Theory
This video discusses the randomized SVD and how to make it more accurate with power iterations (multiple passes through the data matrix) and oversampling.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 2 - Given a M...
73 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group

RL Course by David Silver - Lecture 6: Value Function Approximation
97 min
Intermediate
Video
Theory
A deep dive into incremental methods and batch methods of value function approximation.
See More
Computing Euler Angles: The Euler Kinematical Equations and Poisson’s Kinema...
79 min
Intermediate
Video
Theory
In this video we discuss how the time rate of change of the Euler angles are related to the angular velocity vector of the vehicle. This allows us to design an algorithm to consume...
See More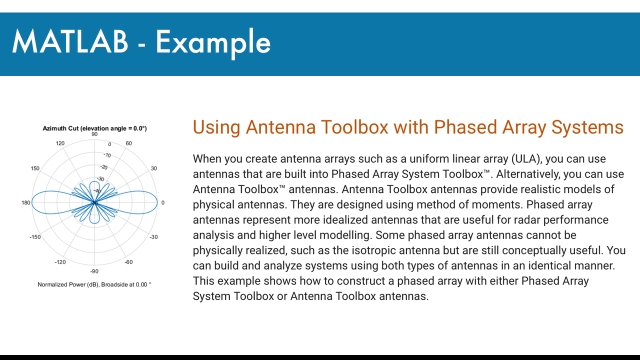
Using Antenna Toolbox with Phased Array Systems
Intermediate
Example
Theory
When you create antenna arrays such as a uniform linear array (ULA), you can use antennas that are built into Phased Array System Toolbox™. Alternatively, you can use Antenna Toolbox™...
See More
Data-Driven Control: Balanced Models with ERA
6 min
Intermediate
Video
Theory
In this lecture, we connect the eigensystem realization algorithm (ERA) to balanced proper orthogonal decomposition (BPOD). In particular, if enough data is collected, then ERA produces...
See More
SVD and Optimal Truncation
11 min
Intermediate
Video
Theory
This video describes how to truncate the singular value decomposition (SVD) for matrix approximation.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 12 - Fast Rei...
81 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
Derivation of Rodrigues’ Rotation Formula
43 min
Intermediate
Video
Theory
In this video we explain and derive Rodrigues’ Rotation Formula. This functions describes how to rotate an arbitrary vector about another arbitrary axis of rotation. This has applications to...
See More
Data-Driven Control: Change of Variables in Control Systems
14 min
Intermediate
Video
Theory
In this lecture, we discuss how linear control systems transform under a change of coordinates in the state variable. This will be useful to derive balancing transformations that identify...
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 15 - Batch Re...
79 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group