

Intro to Data Science: The Nature of Data
12 min
Beginner
Video
Theory
This lecture discusses the types of data you might encounter, and how it determines which techniques to use.
See More
Discrete control #6: z-plane warping and the bilinear transform
25 min
Beginner
Video
Theory
We’re continuing our journey through discrete control and in this video, we’re going to expand our understanding of the bilinear transform. Along the way, we’ll learn about how this...
See More
But what is the Fourier Transform? A visual introduction.
20 min
Beginner
Video
Theory
An animated introduction to the Fourier Transform.
See More
Understanding Control Systems: Open-Loop Control Systems
6 min
Beginner
Video
Theory
This video explores open-loop control systems by walking through some introductory examples.
Learn how open-loop systems are found in everyday appliances like toasters or showers, and...
See More
Autonomous Navigation, Part 6: Metrics for System Assessment
15 min
Beginner
Video
Theory
Take a systems engineering approach to verifying the autonomous navigation system end to end and learn how simulations and physical tests can complement each other. The video also covers a...
See More
What Is a Control System and Why Should I Care?
25 min
Beginner
Video
Demonstration
This is a 25 minute abbreviated version of the Part 1 & Part 2 talk. It goes through the basic ideas while skipping some of the details and examples of the longer talks. The talk abstract...
See More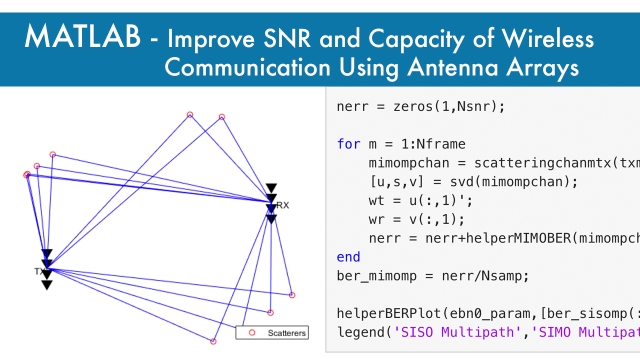
Improve SNR and Capacity of Wireless Communication Using Antenna Arrays
Beginner
Example
Application
The goal of a wireless communication system is to serve as many users with the highest possible data rate given constraints such as radiation power limit and operating budget. To improve the...
See More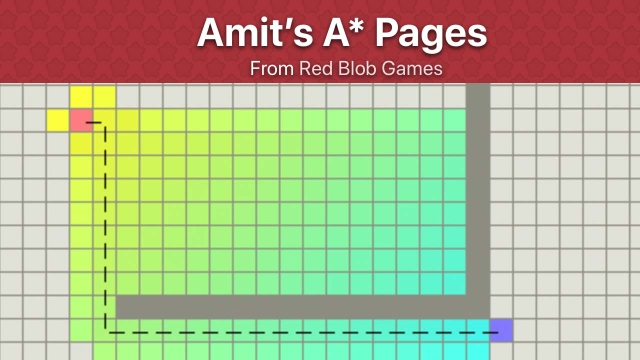
Pathfinding with A*
60 min
Beginner
Article / Blog
Application
An interactive visual explanation of the A* pathfinding algorithm. This resource uses motivating examples from computer games.
See More

Control Bootcamp: Observability Example in Matlab
8 min
Beginner
Video
Application
This video explores observability in Matlab on the example system of an inverted pendulum on a cart.
See More
Control Design Onramp with Simulink
60 min
Beginner
Software
Demonstration
Learn the basics of feedback control design in Simulink®. Adjust the gains of a PID controller to change the dynamics of a physical system and get the closed-loop system behavior that you...
See More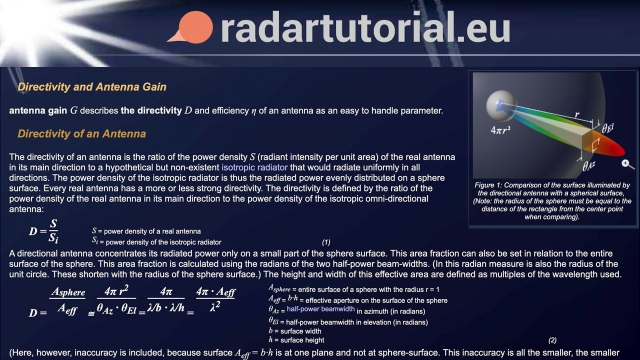
Directivity and Antenna Gain - radartutorial.eu
Beginner
Article / Blog
Theory
This page describes antenna directivity and gain. The directivity of an antenna is the ratio of the power density S (radiant intensity per unit area) of the real antenna in its main...
See More
Control Systems in Practice, Part 1: What Control Systems Engineers Do
14 min
Beginner
Video
Theory
This video walks through the phases of a typical project and describes what it means to be a control systems engineer. It covers the concept formulation phase, in which your job is to help...
See More
Student's Guide to Bayesian Statistics
15 min
Beginner
Video
Theory
This video provides a summary of a textbook Bed Lambert wrote on Bayesian inference and accompanying (freely available) YouTube course.
See More
Converting Constrained Optimization to Unconstrained Optimization Using the ...
54 min
Beginner
Video
Theory
In this video we show how to convert a constrained optimization problem into an approximately equivalent unconstrained optimization problem using the penalty...
See More
What is a Matched Filter?
10 min
Beginner
Video
Theory
This video explains the Matched Filter from a signals perspective.
See More
A* Pathfinding (E01: algorithm explanation)
12 min
Beginner
Video
Theory
Welcome to the first part in a series teaching pathfinding for video games. In this episode we take a look at the A* algorithm and how it works.
See More
Machine Learning Control: Overview
10 min
Beginner
Video
Theory
This lecture provides an overview of how to use machine learning optimization directly to design control laws, without the need for a model of the dynamics.
See More
First-Order Filters
Beginner
Article / Blog
Application
Use data filters to temper noise - relation of options to lag and variance reduction
See More
Quanser QUBE-Servo 2: Low-cost Teaching Platform for Controls
Beginner
Hardware
Application
The Quanser QUBE-Servo 2 is a fully integrated, modular servomotor lab experiment designed for teaching mechatronics and control concepts at the undergraduate level. Ideal for teaching speed...
See More
Autodesk Tinkercad
Beginner
App
Application
Tinkercad is a free, easy-to-use web app that equips the next generation of designers and engineers with the foundational skills for innovation: 3D design, electronics, and coding!
See More
Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields...
Beginner
Book
Theory
From the reviews: "This book is concerned with the application of methods from dynamical systems and bifurcation theories to the study of nonlinear oscillations. Chapter 1 provides a review...
See More
Reinforcement Learning for Engineers, Part 5: Overcoming the Practical Chall...
16 min
Beginner
Video
Theory
This video addresses a few challenges that occur when using reinforcement learning for production systems and provides some ways to mitigate them. Even if there aren’t straightforward ways...
See More
Lectures on Modelling and Control of Dynamic Systems (French)
Beginner
Article / Blog
Theory
Lectures on Modelling and Control of Dynamic Systems from Patrick Lanusse of Bordeaux INP, France.
See More
Systems Engineering, Part 4: An Introduction to Requirements
15 min
Beginner
Video
Theory
Get an introduction to an important tool in systems engineering: requirements. You'll learn about the three things every requirement must have and what makes a requirement valid. You'll also...
See More![Inverted Pendulum on a Cart [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_377.jpg?itok=1srGYhtD "Inverted Pendulum on a Cart [Control Bootcamp]")
Inverted Pendulum on a Cart [Control Bootcamp]
15 min
Beginner
Video
Theory
In this video, we introduce an example system to control: an inverted pendulum on a cart. We describe the state-space, find the fixed points, and simulate the system in Matlab. Because the...
See More