

Introduction to Classic Control Theory (Japanese)
Beginner
Video
Theory
A collection of video lectures by Yuki Nishimura covering an introduction to classic control theory.
See More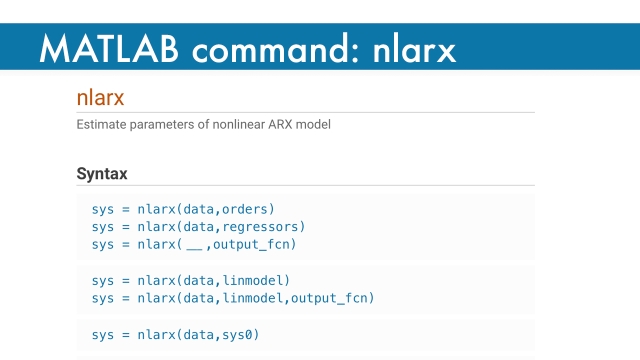
MATLAB Documentation page: nlarx command
Intermediate
Article / Blog
Application
This is the Mathworks documentation page for the nlarx MATLAB command.
See More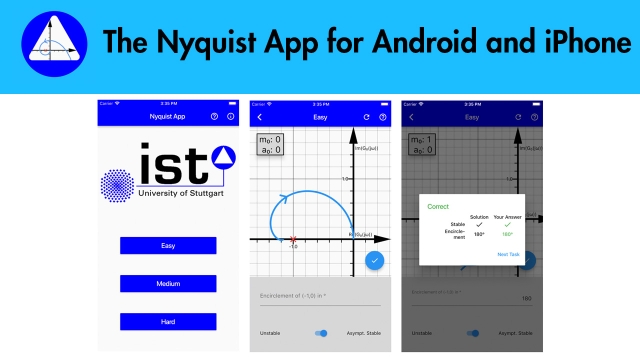
Android and iPhone E-Learning App for Nyquist Stability Criterion
Intermediate
App
Theory
In our Nyquist App, you can analyze the stability of the closed loop by using the Nyquist stability criterion. With the Nyquist stability criterion, you can determine the stability of the...
See More
Nathan Kutz:"Data-driven Discovery of Governing Physical Laws"
73 min
Intermediate
Video
Theory
Seminar by Dr.Nathan Kutz on "Data-driven Discovery of Governing Physical Laws" on 10/31/2018 CICS Seminar Series
See More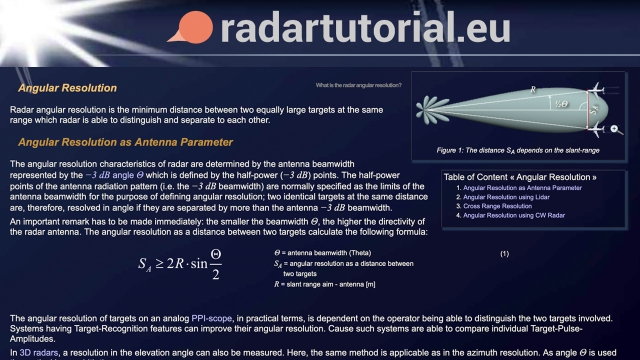
Radar Angular Resolution
Beginner
Article / Blog
Theory
This radartutorial.eu page describes angular resolution. Radar angular resolution is the minimum distance between two equally large targets at the same range which radar is able to...
See More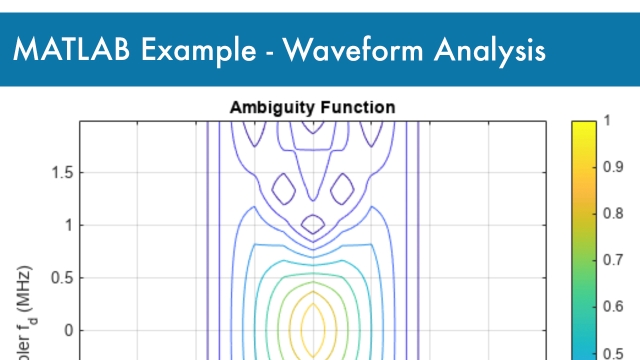
MATLAB Example: Waveform Analysis Using the Ambiguity Function
Intermediate
Example
Application
This example shows how to use the ambiguity function to analyze waveforms. It compares range and Doppler capabilities of several common pulsed waveforms such as the rectangular waveform, the...
See More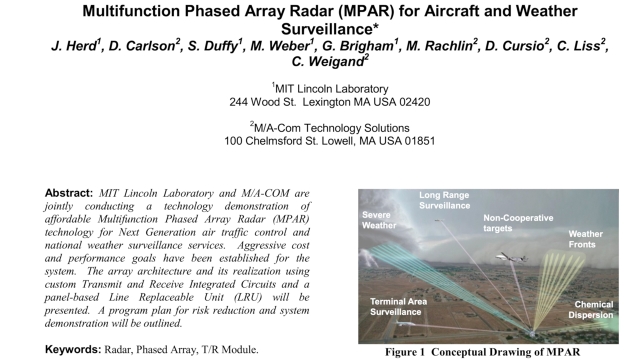
Multifunction Phased Array Radar (MPAR) for Aircraft and Weather Surveillanc...
Intermediate
Peer Reviewed Paper
Application
MIT Lincoln Laboratory and M/A-COM are jointly conducting a technology demonstration of affordable Multifunction Phased Array Radar (MPAR) technology for Next Generation air traffic control...
See More
Cascade Control
15 min
Intermediate
Article / Blog
Application
When and how to use Cascade Control
See More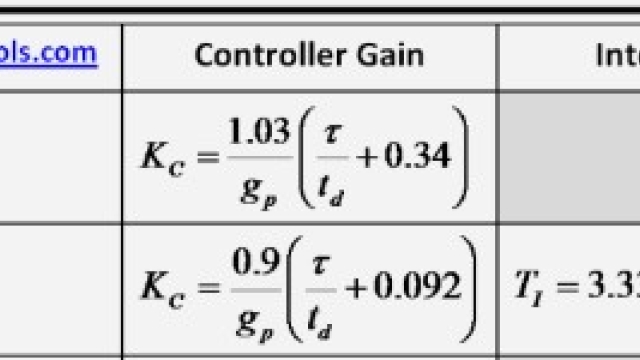
Cohen-Coon Tuning
15 min
Intermediate
Article / Blog
Application
A procedure and commentary on this tuning approach that includes deadtime.
See More
Reinforcement Learning for Engineers, Part 5: Overcoming the Practical Chall...
16 min
Beginner
Video
Theory
This video addresses a few challenges that occur when using reinforcement learning for production systems and provides some ways to mitigate them. Even if there aren’t straightforward ways...
See More
Robotarium by Georgia Tech
0 min
Intermediate
Remote Lab
Application
The Robotarium project provides a remotely accessible swarm robotics research platform that remains freely accessible to anyone. Currently, Robotics research requires significant investments...
See More
Quanser QUBE-Servo 2: Low-cost Teaching Platform for Controls
Beginner
Hardware
Application
The Quanser QUBE-Servo 2 is a fully integrated, modular servomotor lab experiment designed for teaching mechatronics and control concepts at the undergraduate level. Ideal for teaching speed...
See More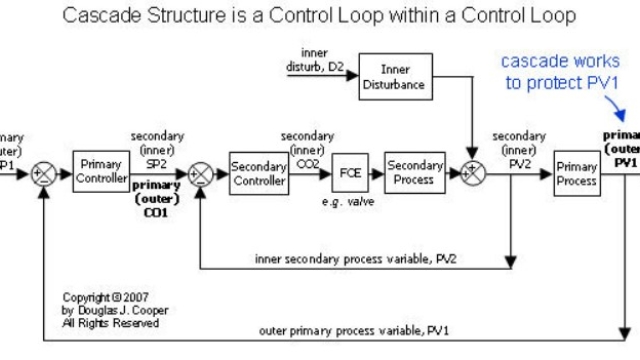
Cascade Control 2
Intermediate
Article / Blog
Application
An Implementation Recipe for Cascade Control
See More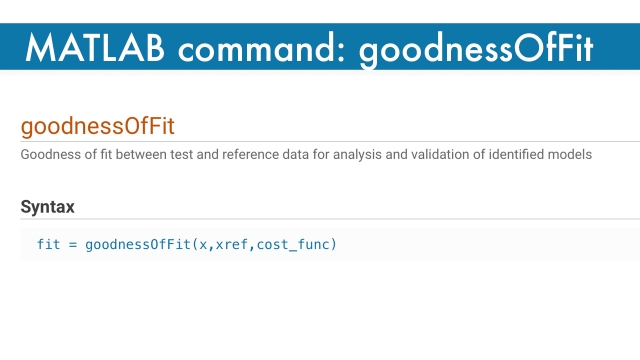
MATLAB Command: goodnessOfFit
Intermediate
Article / Blog
Application
Goodness of fit between test and reference data for analysis and validation of identified models
See More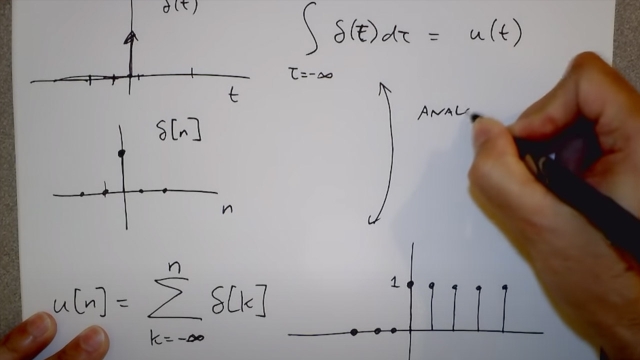
DSP Lecture 1: Signals
66 min
Beginner
Video
Theory
This is a video lecture for ECSE-4530 Digital Signal Processing by Rich Radke, Rensselaer Polytechnic Institute.
See More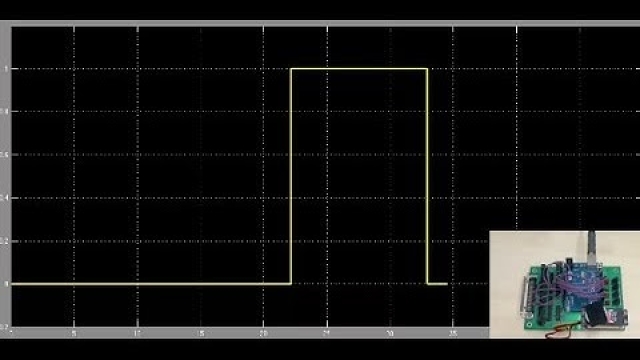
Online Fault Detection for a DC Motor
5 min
Intermediate
Video
Application
Program embedded processors to estimate parameters and detect changes in motor dynamics in real time using System Identification Toolbox™.
See More
What Is a Control System and Why Should I Care?
25 min
Beginner
Video
Demonstration
This is a 25 minute abbreviated version of the Part 1 & Part 2 talk. It goes through the basic ideas while skipping some of the details and examples of the longer talks. The talk abstract...
See More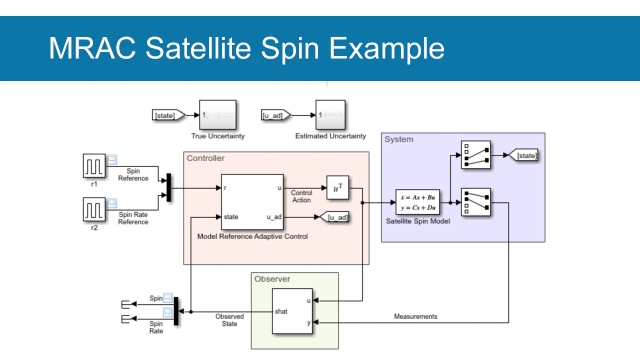
Model Reference Adaptive Control of Satellite Spin
Intermediate
Project
Theory
This example shows how to control satellite spin using model reference adaptive control (MRAC) to make the unknown controlled system match an ideal reference model. The satellite system is...
See More
Multi-agent reinforcement learning: An overview
Intermediate
Peer Reviewed Paper
Theory
From the abstract:
Multi-agent systems can be used to address problems in a variety of do- mains, including robotics, distributed control, telecommunications, and economics. The complexity...
See More
Autonomous Navigation, Part 6: Metrics for System Assessment
15 min
Beginner
Video
Theory
Take a systems engineering approach to verifying the autonomous navigation system end to end and learn how simulations and physical tests can complement each other. The video also covers a...
See More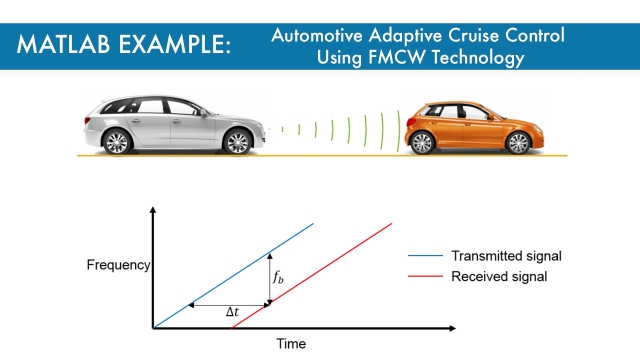
Automotive Adaptive Cruise Control Using FMCW Technology
Intermediate
Example
Application
This MATLAB example shows how to model an automotive adaptive cruise control system using the frequency modulated continuous wave (FMCW) technique. This example performs range and Doppler...
See More
Wind Tunnel Data Analysis and Testing Considerations
111 min
Intermediate
Video
Theory
This is the last video in our 3 part series on wind tunnel testing. In this video, we discuss what typical plots of wind tunnel data might look like and how to extract relevant information...
See More
Control Bootcamp: Overview
19 min
Beginner
Video
Theory
Overview lecture for bootcamp on optimal and modern control. In this lecture, we discuss the various types of control and the benefits of closed-loop feedback control.
See More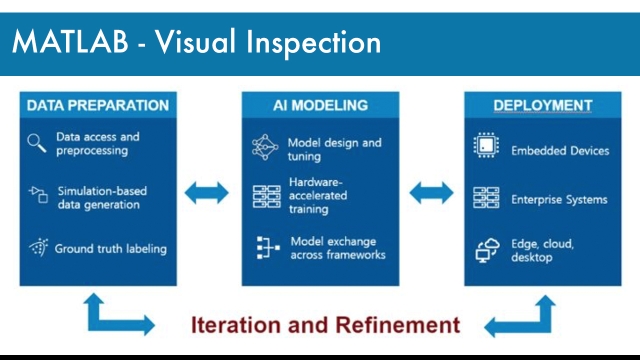
MATLAB Discovery Page - Visual Inspection
Beginner
Article / Blog
Theory
Visual inspection is the image-based inspection of parts where a camera scans the part under test for both failures and quality defects. Automated inspection and defect detection are...
See More
What are Phased Arrays?
17 min
Beginner
Video
Theory
This video introduces the concept of phased arrays. An array refers to multiple sensors, arranged in some configuration, that act together to produce a desired sensor pattern. With a phased...
See More