


Time domain - tutorial 2: signal representation
2 min
Beginner
Video
Theory
In this video, we review how to represent information as a signal. The information can be anything such as voice (1D) or an image (2D) or even a video (3D). ...
See More
Cascade Control Intro
8 min
Beginner
Video
Theory
How can we improve the disturbance rejection of our controllers using additional, relevant measurements? Tune in to find out!
See More
Posicast Control 5 - (In English)
7 min
Beginner
Video
Theory
In this video Posicast in closed-loop is illustrated using a gantry-crane system simulations.
See More
Lecture 28: Lag Compensator Design using Bode Plots
51 min
Beginner
Video
Theory
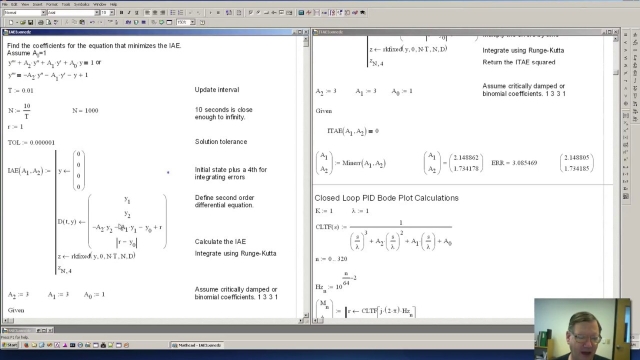
Peter Ponders PID - IAE,ITAE,ISE Performance indicators
17 min
Beginner
Video
Theory
Performance indicators can be used to compute closed loop pole locations. Only one gain parameter is required to move the pole locations closer to the origi...
See More
Dynamic Modeling in Process Control
14 min
Beginner
Video
Theory
I'll show you how we can build the dynamic models necessary to derive process transfer functions as an introduction to process control.
See More
Stanford CS234: Reinforcement Learning | Winter 2019 | Lecture 1 - Introduct...
66 min
Intermediate
Video
Theory
Professor Emma Brunskill
Assistant Professor, Computer Science
Stanford AI for Human Impact Lab
Stanford Artificial Intelligence Lab
Statistical Machine Learning Group
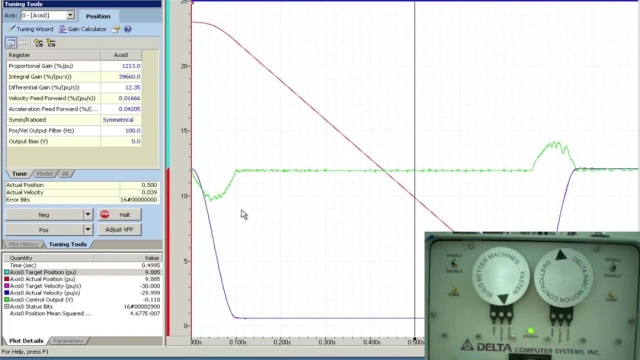
Auto Tuning a Small DC Motor in Torque Mode
1 min
Beginner
Video
Theory
I was really testing the picture in picture feature of the Screen Flow software I use to make these videos. I knew the auto tuning would work. I kept the v...
See More
Deploying Deep Learning Models | Deep Learning for Engineers, Part 5
15 min
Beginner
Video
Theory
This video covers the additional work and considerations you need to think about once you have a deep neural network that can classify your data. We need to consider that the trained network...
See More
RL Course by David Silver - Lecture 7: Policy Gradient Methods
94 min
Intermediate
Video
Theory
Looks at different policy gradients, including Finite Difference, Monte-Carlo and Actor Critic.
See More
Introduction to System Stability and Control
11 min
Beginner
Video
Theory
This video attempts to provide an intuitive understanding of concepts like stability and stability margin. I briefly describe both of these topics with examples and explain how you can...
See More")
Koopman Spectral Analysis (Overview)
27 min
Intermediate
Video
Theory
In this video, we introduce Koopman operator theory for dynamical systems. The Koopman operator was introduced in 1931, but has experienced renewed interest recently because of the...
See More
Routh-Hurwitz Criterion, An Introduction
12 min
Beginner
Video
Theory
This video gives an introduction into the Routh-Hurwitz Criterion and the Routh Array. I also present a little background information in order to emphasize why the method was developed and...
See More
TikZ source Code: Feedback passivity index
Beginner
Source Code
Application
TikZ source Code: Feedback passivity index
See More
Constraint Enforcement for Improved Safety | Learning-Based Control
14 min
Beginner
Video
Theory
Learn about the constraints of your system. Then see a how to enforce those constraints so the system does not violate them. Constraint enforcement is important for safety-critical...
See More![Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_304.jpg?itok=qj48C5IZ)
Controllability, Reachability, and Eigenvalue Placement [Control Bootcamp]
10 min
Beginner
Video
Theory
This lecture explains the equivalence of controllability, reachability, and the ability to arbitrarily place eigenvalues of the closed loop system.
See More
Singular Value Decomposition (SVD): Matrix Approximation
14 min
Intermediate
Video
Theory
This video describes how the singular value decomposition (SVD) can be used for matrix approximation.
See More
Tuning a Fuzzy Logic Controller with Data | Fuzzy Logic, Part 4
18 min
Beginner
Video
Theory
This video covers the basics of data-driven approaches to tuning fuzzy inference systems. See what it means to find an optimal solution, which fuzzy inference parameters are being tuned...
See More
TikZ source Code: Sliding Mode Control Example System 2
Beginner
Source Code
Application
TikZ source Code: Sliding Mode Control Example System 2
See More
Data-Driven Control: ERA and the Discrete-Time Impulse Response
5 min
Intermediate
Video
Theory
In this lecture, we describe how the discrete-time impulse response is used in the eigensystem realization algorithm (ERA).
See More![SVD: Importance of Alignment [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_422.jpg?itok=Ix4uqD1g)
SVD: Importance of Alignment [Python]
6 min
Beginner
Video
Application
This video describes the importance of aligning data when using the singular value decomposition (SVD) (Python code).
See More")
Velocity & Acceleration in Non-Inertial Reference Frames (Coriolis &...
133 min
Beginner
Video
Theory
In this video we derive a mathematical description of velocity and acceleration in non-inertial reference frame. We examine the effect of fictitious forces ...
See More![Linear Regression 3 [Python]](/sites/default/files/styles/search_resulkts/public/2020-12/maxresdefault_438.jpg?itok=rU8HcFY_ "Linear Regression 3 [Python]")
Linear Regression 3 [Python]
10 min
Intermediate
Video
Application
This video describes how the singular value decomposition (SVD) can be used for linear regression in Python (part 3).
See More
Simple Vector Mechanics: Inner Product, Scalar/Vector Projection, and Cross ...
51 min
Intermediate
Video
Theory
In this video we discuss several simple vector operations such as: 1. Computing the magnitude of a vector 2. The inner/dot product 3. The scalar and vector projection 4. The cross product
See More
Control Bootcamp: Benefits of Feedback on Cruise Control Example (Part 2)
11 min
Beginner
Video
Theory
Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise control example. (Part 2)
See More